- I robot sono macchine programmabili capaci di eseguire compiti complessi, spesso meglio degli esseri umani. Utilizzati in settori come quello medico e industriale, la loro presenza nella vita quotidiana è cresciuta notevolmente, rendendoli sempre più comuni.
- I robot sono macchine ideali per compiti che richiedono ripetitività, velocità e precisione, i robot possono svolgere operazioni complesse come trasportare oggetti e assemblare parti meccaniche. Con l’intelligenza artificiale, possono adattarsi a nuove situazioni e fornire vantaggi aziendali significativi in termini di risparmio di tempo e costi.
- Tendenze nella robotica per il 2024: secondo l’IFR, le cinque principali tendenze sono l’intelligenza artificiale e l’apprendimento automatico, l’espansione dei cobot a nuove applicazioni, i manipolatori mobili, i gemelli digitali e i robot umanoidi. Questi sviluppi promettono di ampliare ulteriormente l’uso e le capacità dei robot in vari settori.
La definizione di robot può suonare un po’ riduttiva ma, di fatto, viene identificato come una macchina programmabile in grado di eseguire una serie di azioni/attività complesse al pari (o meglio) di un essere umano. I robot possono essere impiegati in svariati settori, come quello medico o industriale. La loro presenza nella vita quotidiana è cresciuta notevolmente negli ultimi anni e sta diventando sempre più comune.
I robot sono ideali per compiti che richiedono ripetitività, velocità e precisione. Possono svolgere operazioni complesse come trasportare oggetti, assemblare parti meccaniche, manipolare impianti di produzione industriale e altro ancora.
Indice degli argomenti:
Robot: le 5 tendenze top del 2024
Ecco quali sono le 5 tendenze nella robotica secondo l’IFR
- Intelligenza artificiale e apprendimento automatico
- I cobot si espandono a nuove applicazioni
- Manipolatori mobili
- Gemelli digitali (Digital twins)
- Robot umanoidi

I robot possono essere progettati per apprendere dalle esperienze passate e adattarsi alle nuove situazioni. Ciò significa che se l’input cambia (ad esempio un prodotto diverso), anche il risultato finale sarà diverso. I robot possono anche essere programmati per reagire automaticamente a determinati input, come rilevare un cambiamento di temperatura o regolare la velocità del motore in base alle condizioni della strada. Inoltre, il loro uso può fornire un grande vantaggio aziendale, sia in termini di risparmio di tempo che di costi. Questa tecnologia sta attirando l’attenzione delle imprese e dei marchi famosi in tutto il mondo.
I robot rappresentano un’ottima opportunità per le aziende di tutti i settori, poiché possono fornire risultati precisi e veloci con la possibilità di adattarsi alle nuove situazioni. Con l’avvento dell’intelligenza artificiale (AI), le applicazioni dei robot si sono espresse in una grande varietà di settori, tra cui il riconoscimento facciale, l’elaborazione del linguaggio naturale e la diagnostica medica. Inoltre, possono essere utilizzati anche per svolgere attività di monitoraggio e gestione, come l’analisi dei dati o la creazione di contenuti personalizzati. Ciò significa che i robot possono aiutare le imprese ad acquisire più informazioni sui propri clienti, fornendo così ulteriori vantaggi competitivi.
Perché si chiama robot
L’origine del termine è legata allo scrittore ceco Karel Čapek il quale utilizzò la parola robot (su suggerimento del fratello Josef) per la prima volta nel 1920 nella commedia intitolata RUR (Rossumovi Univerzální Roboti – Universal Robots of Rossum) dove compariva un umanoide immaginario, identificato come robot per richiamare la parola ceca robota, termine che letteralmente significava “lavoro degli schiavi” (lavoro che i servi dovevano offrire ai propri padroni per un periodo di tempo non pagati) ed in senso figurato richiamava il lavoro forzato (nell’accezione di lavoro pesante).
La definizione di robot può suonare un po’ riduttiva ma, di fatto un robot è una macchina programmabile in grado di eseguire una serie di azioni/attività complesse al pari (o meglio) di un essere umano.
Analizziamo cosa sono i robot, come si classificano, cosa sanno fare e per cosa vengono utilizzati oggi.
Cos’è un robot
Nell’immaginario comune identifichiamo i robot come macchine hardware dotate anche di una componente software. In realtà oggi il termine robot afferisce anche alla branca degli agenti virtuali e di sistemi software come i chatbot, che più comunemente vengono chiamati bot, o i sistemi RPA – Robotic Process Automation (in sostanza macchine programmabili che non hanno la componente hardware).
Un robot può essere autonomo o semi-autonomo a seconda delle sue capacità e funzionalità, può agire e/o muoversi in autonomia ed essere dotato di una sistema di controllo interno, può affiancare altri sistemi ed esseri umani, può essere semi-autonomo con un sistema di controllo remoto.
Guardando alle sue capacità/funzioni, un automa oggi potrebbe oggi essere definito come un sistema artificiale in grado di svolgere compiti e attività con differenti livelli di autonomia.
Le definizioni ufficiali di robot
Un robot (o roboto), macchina che compie attività al posto dell’uomo.
Riuscire a dare una definizione univoca e dire con fermezza cos’è un robot non è affatto semplice, forse anche perché la sua realizzazione, il suo funzionamento ed utilizzo coinvolgono molteplici discipline.
Per realizzare un automa è necessario avere competenze di meccanica, elettronica, informatica, oggi confluenti nella cosiddetta ingegneria meccatronica. Ma per poterlo utilizzare in contesti sempre più complessi e con funzionalità e capacità sempre più avanzate (autonomia di azione, apprendimento automatico, capacità decisionale e di attuazione, ecc.) diventa necessario estendere conoscenze anche sul fronte dell’intelligenza artificiale e di materie legate a neuroscienze, psicologia, logica, matematica, biologia, fisiologia, linguistica e in modo indiretto anche a materie come filosofia, sociologia ed etica.
Proviamo allora a presentare alcune definizioni che, seppur differenti, racchiudono ognuna alcune peculiarità che possono aiutare a darne una definizione più o meno ampia.
Secondo l’enciclopedia Treccani “i robot, strutture meccano-elettriche versatili e adattabili a diverse situazioni, capaci di riprodurre varie attività elementari, rappresentano in un certo senso la materializzazione significativa e tangibile di un antico sogno dell’uomo. A essi l’uomo può trasferire l’esecuzione di attività ripetitive, faticose o pericolose, che richiedono rapidità di movimento, elevata precisione di posizionamento e ripetibilità di esecuzione”.
Secondo la definizione che ne ha dato la Società Italiana di Robotica Industriale (SIRI), “il robot è un manipolatore programmabile multiscopo per la movimentazione di materiali, di attrezzi e altri mezzi di produzione, capace di interagire con l’ambiente nel quale si svolge il ciclo tecnologico di trasformazione relativo all’attività produttiva”.
Una definizione utile è quella del professore Michael Brady fondatore del Robotics Research Group Università di Oxford, che scrive: ”la robotica è la connessione intelligente tra percezione ed azione”.
Partendo da questo assunto potremmo allora dire che un robot è qualcosa che reagisce in modo intelligente a una situazione ambientale che rileva attraverso un sistema di sensori e questa sua reazione serve a raggiungere un determinato scopo.
A cosa serve un robot e cosa può fare per gli esseri umani
Ma a cosa può servire oggi un robot? In base alle loro capacità gli automi possono essere distinti in robot non autonomi e robot autonomi.
- I robot non autonomi sono quelli che vengono comandati da un software, da un programma che definisce a priori che cosa deve fare la macchina, oppure direttamente da un essere umano (pensiamo per esempio a macchine radio e tele comandate). Questi solitamente vengono impiegati per compiti molto specifici (dato che vengono programmati per poter svolgere determinate funzioni). Si pensi per esempio ai Rover per l’esplorazione di Marte o ai robot utilizzati nelle produzioni industriali lungo le catene di montaggio. Si tratta di sistemi che riescono a svolgere le proprie funzioni, anche muoversi in ambienti ostili come i robot spaziali, perché comandati da un programma software deterministico (che definisce in che modo le macchine devono muoversi e svolgere i propri compiti, spesso ripetitivi come quelli del ciclo produttivo).
- I robot autonomi, al contrario, sono macchine artificiali con un certo grado di autonomia e riescono ad elaborare risposte, trovare soluzioni e risolvere problemi in situazioni impreviste (cioè non programmate dal software). Si tratta di macchine che solitamente non vengono programmate con soluzioni software deterministiche (tipiche dell’informatica tradizionale) ma con algoritmi utilizzati attraverso svariate tecniche di intelligenza artificiale (algoritmi genetici, logica fuzzy, apprendimento automatico, reti neurali). Sono sistemi solitamente mobili capaci di percepire l’ambiente circostante (attraverso vari sensori), di muoversi in differenti ambienti e di compiere azioni e prendere decisioni in funzione del contesto in cui si muovono ed operano. Un esempio molto comune di questo tipo di automi sono i robot domestici come i robot aspirapolvere o i robot da giardino che decidono quando partire, che tragitto compiere e quando ricaricarsi in modo autonomo.
La maturità dell’intelligenza artificiale rappresenta di fatto il drive principale per la nuova generazione di robot, quelli in grado di sviluppare autonomamente nuovi algoritmi per il proprio funzionamento.
- I robot di prima generazione sono infatti macchine programmate capaci di eseguire solamente sequenze prestabilite di operazioni (anche senza la presenza dell’uomo ma comunque senza alcun grado di autonomia).
- I robot di seconda generazione sono quelli autonomi capaci di svolgere funzioni e prendere decisioni attraverso l’apprendimento automatico (machine learning) che consente loro di affrontare anche situazioni non precedentemente definite dal software.
- I robot di terza generazione sono quelli in grado di costruire nuovi algoritmi (senza l’intervento dell’uomo) e di verificarne in autonomia la coerenza rispetto ai compiti che deve svolgere o gli obiettivi che deve raggiungere.
Nota: per l’approfondimento sulla classificazione e i modelli degli automi si rimanda ai capitoli successivi
Cos’è la robotica e come nasce (origini del termine)
La robotica è un ramo della scienza legata alla tecnologia e alle discipline di ingegneria che si occupa di progettazione, sviluppo/costruzione, funzionamento ed applicazione di tutte le componenti di un robot (hardware, software, sensori).
L’origine del termine robotica viene attribuito ad Isaac Asimov, uno dei più importanti scrittori di fantascienza dalla cui penna sono nati i robot positronici e le tre leggi della robotica.
Secondo l’Oxford English Dictionary, Asimov parla di robotica per la prima volta nel 1941 in un racconto intitolato Bugiardo! (Liar! il titolo originale)
Che vuol dire robotica?
Secondo l’enciclopedia Treccani con il termine robotica ci si riferisce a “quel settore delle scienze dell’ingegneria che ha per oggetto lo studio e la realizzazione dei robot”.
Wikipedia, la libera enciclopedia del web, offre questa definizione di robotica un po’ più estesa: “disciplina dell’ingegneria che studia e sviluppa metodi che permettano a un robot di eseguire dei compiti specifici riproducendo in modo automatico il lavoro umano. Anche se la robotica è una branca dell’ingegneria, più precisamente dell’ingegneria meccatronica, in essa confluiscono approcci di molte discipline sia di natura umanistica, come linguistica, sia scientifica: biologia, fisiologia, psicologia, elettronica, fisica, informatica, matematica e meccanica”.
Le leggi della robotica di Isaac Asimov
Le tre leggi della robotica hanno fatto la loro comparsa per la prima volta nel 1942 in un racconto di Isaac Asimov intitolato Circolo vizioso, pubblicato sulla rivista di fantascienza Astounding Science-Fiction.
Questo racconto (ed i successivi), di fatto, contribuì a cambiare la narrativa fantascientifica dell’epoca trasformando la visione dei robot che, fino ai racconti di Asimov, erano visti e raccontati come esseri malvagi e pericolosi per l’uomo.
I robot positronici protagonisti delle storie nate dalla fantasia e dalla penna di Asimov, se progettati bene e non utilizzati impropriamente, non possono essere pericolosi o rischiosi per l’uomo perché rispondono ad alcuni principi di sicurezza (la prima legge della robotica), servizio (la seconda legge della robotica) e autoconservazione (la terza legge della robotica) con i quali si regolamentava il comportamento dei robot positronici (robot dotati di cervello positronico).
Ecco cosa dicono le tre leggi della robotica:
- prima legge della robotica: un robot non può recar danno a un essere umano né può permettere che, a causa del suo mancato intervento, un essere umano riceva danno;
- seconda legge della robotica: un robot deve obbedire agli ordini impartiti dagli esseri umani, purché tali ordini non vadano in contrasto alla prima legge;
- terza legge della robotica: un robot deve proteggere la propria esistenza, purché la salvaguardia di essa non contrasti con la Prima o con la seconda legge.
Le tre leggi della robotica divennero presto molto popolari tanto da spingere altri scrittori ad utilizzarle, senza però mai citarle in modo chiaro (Asimov ne era geloso e le considerava le sue leggi), e a far addirittura quasi sparire la narrazione e le storie di robot distruttori.
In alcuni dei suoi ultimi racconti Asimov postula l’esistenza di una quarta legge, superiore per importanza alle altre tre denominata la Legge Zero.
Come funzionano i robot: struttura e caratteristiche
Gli automi sono sistemi sempre più complessi e classificarli sono in base alla loro generazione (prima, seconda e terza generazione), o alla differenza tra robot autonomi e non autonomi, non è sufficiente.
Per capire che tipologia e modelli di automi esistono oggi (e che cosa potremo vedere in futuro in fatto di robotica), è necessario capire la struttura dei robot e quali sono le loro principali funzionalità. In linea di massima, hanno quattro “unità funzionali”, devono cioè essere visti come sistemi complessi che hanno “organi funzionali” differenti (organi meccanici, organi sensoriali, organi di controllo, organi di governo e calcolo).
Prima di vedere ciascuno di questi organi è bene ricordare la definizione di robotica fornita dal Robotic Institute of America (RIA): “un robot è un manipolatore multifunzionale e riprogrammabile, progettato per muovere materiali, parti, attrezzi o dispositivi specialistici attraverso movimenti programmati variabili, per l’esecuzione di una varietà di compiti. Un robot acquisisce inoltre informazioni dall’ambiente e si muove in modo intelligente di conseguenza”.
1. Struttura meccanica (organi meccanici o funzionalità meccaniche)
Guardando alla definizione di robotica fornita dal Robotic Institute of America, la struttura meccanica di un robot rappresenta il manipolatore multifunzione. In realtà questo vale più che altro per la robotica industriale perché se si guarda alla robotica di servizio (di cui parleremo nei successivi capitoli), la struttura meccanica corrisponde al sistema di movimento e locomozione del robot.
Gli organi meccanici, infatti, si distinguono tra apparati per compiere operazioni e attività in un posto fisso oppure apparati in grado di spostarsi.
Se volessimo fare un parallelismo con gli organi di movimento degli esseri umani (anche se per certe tipologie di robot può sembrare un po’ azzardato), divideremmo gli organi meccanici in arti superiori (bracci meccanici per lo più, comprese però le estensioni cosiddette end-effector, cioè gli attrezzi come pinne e mani robotiche per la manipolazione) e arti inferiori (non necessariamente gambe meccaniche, oggi appannaggio dei robot più sofisticati, ma organi meccanici come ruote, rotelle, slitte o sistemi di cinematica).
2. Struttura sensoriale
I sistemi robotici sono dotati di una capacità sensoriale che permette loro di percepire il contesto in cui operano. Non si tratta di sensazioni umane, naturalmente, ma di una struttura sensoriale che consente al robot di acquisire dati, sia sullo stato interno della struttura meccanica (sensori propriocettivi che permettono al robot di “percepire”, per esempio, posizione e velocità), sia sull’ambiente esterno circostante (sensori esterocettivi che fanno percepire, per esempio, forza e prossimità e danno al robot una visione artificiale).
3. Struttura di controllo (organi di controllo dei robot)
Gli organi di controllo fanno da connettori tra percezione ed azione e sono i sistemi che garantiscono che il robot compia le attività per cui è stato sviluppato e/o viene impiegato con il grado di precisione e forza programmati.
La struttura di controllo è data da attuatori (motori elettrici, sistemi idraulici o pneumatici, ecc.) e algoritmi di controllo (per il pilotaggio degli attuatori).
4. Struttura di governo (organi di memorizzazione e calcolo)
In questo caso ci si riferisce ai sistemi che consentono di programmare, calcolare, verificare le attività ed il lavoro svolto dalle macchine robotizzate. La struttura di governo e calcolo è solitamente costituita da sistemi hardware (microprocessori, memorie, ecc.) e sistemi software (programmi applicativi, algoritmi di calcolo codificati in linguaggi di programmazione, standard o dedicati).
5. Architettura software e programmazione
L’unità di governo deve gestire le operazioni che deve svolgere il sistema robotico sulla base di un modello interno dell’automa (la sua struttura meccanica) e dei dati forniti dai sensori. Per avere un efficace sistema di governo, l’architettura di controllo dovrebbe essere ripartita in livelli gerarchici con alla base gli algoritmi che determinano i segnali degli attuatori e sul gradino più alto della scala gerarchica la decomposizione del compito da svolgere in attività (con il più elevato grado di astrazione possibile). In una struttura gerarchica di questo tipo, ciascun livello invia il risultato della propria computazione al livello sottostante, dal quale è comunque retroattivamente influenzato.
Guardando invece alla programmazione di un sistema robotico, tre sono gli approcci principali:
- Teaching-by-showing: il robot viene guidato lungo un percorso e apprende le posizioni raggiunte grazie ai sensori; in seguito, si limita a replicare quella sequenza di posizioni;
- Robot-oriented: vi è un linguaggio di programmazione ad alto livello con strutture dati complesse, variabili, routine;
- Object-oriented: come nel precedente, solo che il linguaggio è orientato agli oggetti.
Tra gli organi di calcolo oggi ci sono anche algoritmi e tecniche di intelligenza artificiale che contribuiscono a elevare il livello di indipendenza dei robot autonomi (per esempio attraverso il machine learning).
6. Movimento dei robot: analisi cinematica e analisi dinamica
Come abbiamo visto, un robot è un sistema complesso che presenta una struttura meccanica articolata. Affinché quindi il suo funzionamento sia adeguato alle attività che deve compiere il suo comportamento (movimento, funzionamento) deve essere schematizzato in un modello matematico che tiene conto dei legami di causa-effetto tra i vari organi costituenti (organi meccanici, organi sensoriali, organi di controllo).
Questi modelli matematici possono riguardare l’analisi cinematica e l’analisi dinamica del moto del robot.
- Analisi cinematica, ossia la descrizione quantitativa del moto di un robot (indipendentemente dalle cause del moto stesso). Va però fatta una distinzione tra cinematica e cinematica differenziale: la prima si occupa dei legami che intercorrono tra i parametri interni del robot (le sue parti meccaniche) e la loro posizione e/o orientamento che incidono sul movimento; la seconda invece definisce le relazioni dipendenti dalla velocità (per descrivere il moto del robot in maniera più dettagliata).
- Analisi dinamica, ossia lo studio del moto dell’automa a partire dalle sue cause cioè delle circostanze che lo determinano e lo modificano. Come abbiamo visto ad incidere sul moto sono gli attuatori (organi di controllo) che garantiscono al sistema robotico la potenza necessaria a svolgere un compito o un’attività, ma anche in questo caso bisogna distinguere tra dinamica e dinamica inversa: la prima serve per il calcolo delle accelerazioni dei componenti di un robot in funzione delle forze di attuazione, la dinamica inversa ricerca metodi per determinare le forze di attuazione che consentono di raggiungere le accelerazioni desiderate.
DOF (degrees of freedom): cosa sono i gradi di libertà dei robot
In fisica i gradi di libertà di un sistema meccanico rappresentano il numero di parametri indipendenti che ne definiscono la configurazione (e la complessità). In altre parole, è il numero di parametri che determinano lo stato di un sistema fisico, misurazione molto importante per l’analisi di sistemi di corpi in ingegneria meccanica, ingegneria aeronautica, robotica e ingegneria strutturale.
Se applicati alla robotica, i gradi di libertà esprimono il livello di sofisticazione e complessità tecnologica di un robot. In particolare, con un semplice numero i gradi di libertà di un robot ne definiscono le sua capacità di movimento: tanto più è elevato il numero che stabilisce i gradi di libertà, tanto più il robot è tecnologicamente avanzato nei suoi movimenti.
Robot umanoidi e animali robot (robot che si ispirano, anche nelle fattezze, ad esseri umani o ad animali) solitamente hanno un discreto grado di libertà, generalmente superiore a 20.

Per capire come vengono calcolati i gradi di libertà di un robot prendiamo come esempio uno dei robot umanoidi tecnologicamente più avanzati, iCub, il robot sviluppato dall’Istituto Italiano di Tecnologia (l’IIT di Genova).
Partendo dalla definizione classica di gradi di libertà, sappiamo che il numero di gradi di libertà di un punto materiale è il numero di variabili indipendenti necessarie per determinare univocamente la sua posizione nello spazio (cioè le sue coordinate). Ne desumiamo che il numero di gradi di libertà di un sistema è pari a quello del numero di coordinate generalizzate necessario a descrivere il suo moto.
Perciò, un punto che si muove in uno spazio tridimensionale, ha tre gradi di libertà (è libero cioè di muoversi avanti/indietro, su/giù, sinistra/destra), un punto che si sposta su un piano ha due gradi di libertà.
Nella robotica industriale, in particolare i robot antropomorfi (bracci robotici), solitamente hanno un minimo di sei gradi di libertà perché oltre alla possibilità di muoversi in uno spazio tridimensionale (quindi con tre gradi di libertà), possono ruotare lungo tre assi perpendicolari (avendo quindi 3 ulteriori gradi di libertà).
Fatte queste doverose e necessarie premesse, veniamo al piccolo iCub, un robot che raggiunge i 53 gradi di libertà, che derivano da:
- 7 gradi di libertà per ogni braccio robotico;
- 9 gradi di libertà per ogni mano robotica (3 per il pollice, 2 per l’indice, 2 per il dito medio, 1 per l’anello accoppiato e il dito mignolo, 1 per l’abduzione);
- 6 gradi di libertà per ogni gamba robotica;
- 6 gradi di libertà per i movimenti della testa;
- 3 gradi di libertà per il torace e la colonna vertebrale.
La varie tipologie di robot acquistabili
Come accennato nei capitoli precedenti, i robot sono macchine (più o meno antropomorfe, cioè che presentano sembianze umane nelle funzionalità e nei movimenti ma anche, quando parliamo di umanoidi, nell’aspetto) in grado di svolgere in modo più o meno autonomo un lavoro al posto dell’uomo e sono sistemi ormai sempre più complessi (spesso chiamati anche umanoidi o androidi).
Per capire la differenza tra le varie generazioni di robot e approfondire le peculiarità di robot autonomi e non autonomi rimandiamo alla lettura del capitolo Generazioni di robot: a cosa servono e cosa fanno.
In questo capitolo approfondiamo quali sono le varie tipologie di robot sottolineando le differenze tra antropomorfi, umanoidi e androidi. Per una visione più completa si consiglia di leggere l’articolo relativo alle tipologie di robot in commercio.
Robot industriali e cobot
I robot industriali e i cobot (robot collaborativi) sono dei robot utili per automatizzare le industrie. Questo fenomeno prende il nome di industria 4.0 (o quarta rivoluzione industriale) e permette alle industrie di accelerare i tempi di produzione, risparmiando.

Robot antropomorfi, umanoidi e androidi, le differenze

Gli antropomorfi sono sistemi robotici che riescono ad emulare alcune abilità dell’essere umano come il movimento di gambe e braccia, la percezione e lo spostamento in ambienti fisici. In questa categoria di robot di fatto rientrano sia gli umanoidi sia gli antropomorfi intesi come sistemi di robotica industriale (tipicamente i cosiddetti bracci robotici utilizzati nel settore industriale lungo le linee produttive).
Gli umanoidi sono invece robot autonomi dalle sembianze umane (assomigliano agli esseri umani perché hanno un corpo con testa, braccia e gambe o rotelle che ricordano la fisicità delle persone, anche se sono chiaramente riconoscibili come robot). La ricerca sta sviluppando automi umanoidi sempre più sofisticati con avanzate tecnologie che conferiscono a queste macchine capacità cognitive e sensoriali.
Gli androidi sono sempre robot umanoidi (di fatto vengono spessissimo usati come sinonimi) anche se si tende a far confluire in questa categoria i sistemi robotici che non solo somigliano agli essere umani ma ne replicano anche le fattezze sembrando a tutti gli effetti delle persone.
Esistono poi anche i social robot (ovvero i robot di compagnia) che stanno prendendo sempre più piede come robot domestici che accompagnano anziani, bambini e tutta la famiglia.
Quali e quanti sono i tipi di robot
Robot chirurgo
Una particolare applicazione dei robot si sta diffondendo nel campo della medicina e della chirurgia. Il robot chirurgo è di ausilio all’intervento del medico chirurgo, fino ad arrivare a sostituirlo del tutto. (Da Vinci e Navio, la tecnologia ibrida Artis Zeego/Theno).
Il sistema Corindus consente ai medici di controllare a distanza le procedure angiografiche mini-invasive. Nel febbraio 2021, presso il reparto di Urologia universitaria dell’ospedale Molinette della Città della Salute di Torino, un robot chirurgico ha eseguito un intervento di asportazione di tumore maligno a un rene.
Robot domestici e social
Nuovi robot per uso domestico sono Aido, che grazie al riconoscimento biometrico è in grado di riconoscere i componenti all’interno di una famiglia;
Alpha Mini, family robot pensato per fare compagnia, intrattenere e assistere le famiglie;
Amy, social robot che suggerisce ricette di cucina e modalità di preparazione dei cibi, sorveglia gli animali domestici, controlla i bambini, ricorda appuntamenti e scadenze, fa la guardia all’abitazione;
Pepper, umanoide alto circa un metro e 20, prodotto da Softbank Robotics, che riesce a interagire in modo naturale con le persone, riconoscendo non solo i volti ma anche le espressioni e le emozioni umane.

Robot in agricoltura: TerraSentia
TerraSentia ha le sembianze di una macchina telecomandata. In realtà è un robot che riesce a muoversi tra i solchi di un campo e a verificare lo stato di salute delle piante e del terreno.
I robot Boston Dynamics
Boston Dynamics debutta nel settore della robotica nel 2005, quando presenta BigDog un mulo robotico a 4 zampe creato per affiancare i militari e trasportare la loro attrezzatura in tutti quei terreni in cui un normale mezzo a ruote o cingoli non riuscirebbe a muoversi. Da allora la produzione non si è più fermata e sono usciti nuovi modelli sempre più perfezionati.
Cheetah robot
Questo quadrupede è il primo capace di raggiungere la ragguardevole velocità di 27 km orari.
Littledog robot
LittleDog, frutto dell’evoluzione di BigDog, è infatti una versione rimpicciolita dello stesso, con molta più elettronica e dati.
Petman robot
Petman, il primo robot antropomorfo che si muove come una persona reale e che come questa (e al posto di questa) può essere utilizzato per eseguire tutti i test e le operazioni pericolose per l’uomo.
Boston Dynamics ha continuato a lavorare sull’aggiornamento dei propri robot, con l’obiettivo di aggiungere interazioni, fisicità, sensoristica e intelligenza artificiale.

Atlas robot
L’evoluzione di Petman, robot antropomorfo, umanoide, capace ormai di eseguire la quasi totalità dei movimenti tipici dell’essere umano.
Spot robot
Pronipote di LittleDog, evoluzione, grazie a un peso e dimensioni non proibitive (pesa 25 kg), buona autonomia e un prezzo dichiarato popolare (circa 75mila dollari).
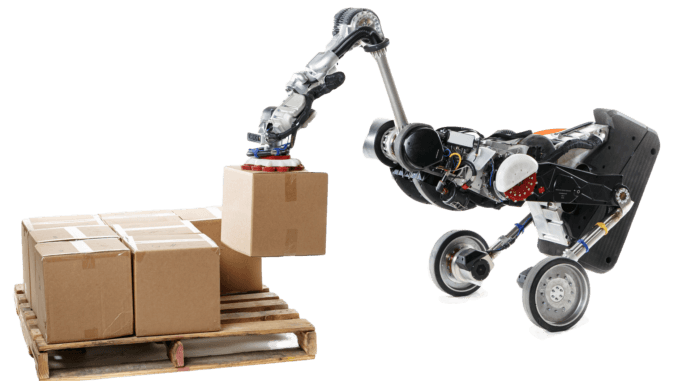
Handle robot
Robot flessibile, dotato di due gambe montate su ruote e uno o due arti superiori per la movimentazione e il trasporto di oggetti.
Robot, cosa sono e quali sono le previsioni future
Robot geminoidi, gemelli dell’uomo
Geminoide è una tipologia di robot gemello di un essere umano, costruito cioè in modo da assomigliare, sia nell’aspetto fisico che nei movimenti, a un uomo. Il primo prototipo è del 1973, Wabot-1, androide realizzato dalla Waseda University di Tokyo. Il principale creatore di questi robot è Hiroshi Ishiguro, professore dell’Università di Osaka e responsabile all’ATR Intelligent Robotics and Communication Laboratories, che ha realizzato diverse versioni di Geminoide HI, suo alter ego robotico.
Gynoid e fembot, quando il robot è donna
Gynoid (o ginoide) e fembot, due sinonimi che indicano una versione con sembianze femminili dell’androide. Uno dei ginoidi più conosciuti al grande pubblico è sicuramente il robot Sophia.
Shopping assistance robot
L’utilizzo dei robot nel settore delle vendite sta diventando sempre più comune. Per replicare le esperienze degli acquirenti con i venditori nell’interazione cliente-robot si sta cercando di rendere la macchina simile a un essere umano nei suoi comportamenti e nelle sue apparenze.
Tesla Bot
Annunciato da Elon Musk, patron di Tesla, a ottobre 2021, Tesla Bot è un robot alto circa 1,75 m, del peso di poco più di 50 kg, in grado di muoversi a circa 8 km/h e di trasportare pesi fino a 20 kg. Non ancora annunciati la data di messa in produzione e il prezzo.
Atlas, LittleDog & Co., i performanti robot di Boston Dynamics
Dalla nascita come spin-off del Mit di Boston, nel 1992, all’acquisizione da parte della giapponese SoftBank Robotics nel 2020. Boston Dynamics è uno dei produttori di robot più prolifico e creativo.
Swarm robotics, o “robotica degli sciami”
Swarm robotics è una disciplina della robotica, legata all’AI, che progetta robot semplici sulla base dei comportamenti e delle attitudini degli insetti sociali. Essi possono risolvere, in gruppo, compiti complessi che un singolo non riuscirebbe a compiere.
RoBee, il cobot umanoide made in Italy
Robee è un cobot industriale certificato, in grado di svolgere molteplici attività al pari degli esseri umani, specie quelle molto ripetitive e pericolose, che potrà essere impiegato nei più diversi settori produttivi: servizi, retail, industriale e medicale. A produrlo è una azienda italiana, la Oversonic Robotics. Verrà venduto a partire dal 2022 al prezzo di 120mila euro, ai quali vanno aggiunti 20mila euro di fee annuali.
Robotica e intelligenza artificiale
L’intelligenza artificiale ha un grande potenziale per la robotica, consentendo una serie di vantaggi in settori diversi come la produzione e la sanità. Sebbene l’AI stia già lasciando il segno nella robotica, il suo sviluppo avviene a un ritmo molto più lento e in un campo di applicazione molto più ristretto di quanto si pensi.

L’obiettivo principale dell’utilizzo dell’AI nella robotica è quello di gestire meglio la variabilità e l’imprevedibilità dell’ambiente esterno, sia in tempo reale che off-line. Ciò offre vantaggi per i produttori, i fornitori di logistica e i rivenditori che hanno a che fare con prodotti, ordini e scorte che cambiano frequentemente in ambienti cosiddetti “ad alto mix/basso volume”. Inoltre, aiuta i robot a funzionare in ambienti pubblici – dai supermercati agli ospedali – che sono intrinsecamente imprevedibili. L’intelligenza artificiale non è necessariamente un prerequisito per gestire la variabilità e l’imprevedibilità. Ad esempio, semplici applicazioni di pick and place con variazioni nel posizionamento del prodotto, ma non nel prodotto stesso, possono essere realizzate senza AI. Anche la mobilità dei robot non richiede l’intelligenza artificiale.
Tuttavia, maggiore è la variabilità e l’imprevedibilità dell’ambiente, più è probabile che gli algoritmi di AI forniscano una soluzione rapida ed economica, ad esempio per i produttori o i grossisti che hanno a che fare con milioni di prodotti diversi che cambiano regolarmente. L’AI è utile anche in ambienti in cui i robot mobili devono distinguere tra gli oggetti o le persone che incontrano e rispondere in modo diverso.
Si distinguono due categorie principali di applicazioni:
- Applicazioni sense-and-respond, in cui il robot identifica e risponde autonomamente all’ambiente esterno in un ciclo chiuso in tempo reale.
- Ottimizzazione delle prestazioni, in cui l’intelligenza artificiale viene utilizzata per ottimizzare la progettazione dei processi e la programmazione dei robot, nonché per migliorare l’ispezione e la manutenzione della qualità.
Le applicazioni pick-and-place sono il tipo di applicazione sense-and-respond più adottato nella produzione e nella logistica. Il pick-and-place copre un’ampia gamma di applicazioni, tra cui la pallettizzazione, l’imballaggio e la gestione delle macchine. Altre applicazioni manifatturiere in fase iniziale di adozione dell’intelligenza artificiale sono l’assemblaggio e la saldatura. L’intelligenza artificiale ha un notevole potenziale per accelerare la progettazione e la programmazione dell’automazione robotizzata, anche se si tratta di una fase iniziale di sviluppo.

L’intelligenza artificiale potrebbe contribuire a ridurre in modo significativo il costo complessivo dell’installazione e della riprogrammazione di un’applicazione robotizzata, secondo alcuni esperti anche del 50%. Ciò contribuisce a rendere l’automazione economicamente conveniente per i piccoli e medi produttori e per le grandi aziende con un’elevata variabilità. L’uso dell’intelligenza artificiale nella progettazione e nella programmazione delle applicazioni robotiche è tuttavia ancora in una fase iniziale.
Intelligenza artificiale e robot: quali applicazioni pratiche
Attualmente, l’applicazione più consolidata per l’ottimizzazione delle prestazioni è l’ispezione robotica della qualità. L’intelligenza artificiale consente di identificare i difetti che potrebbero essere impercettibili per l’uomo in ogni fase del ciclo produttivo. In questo modo si migliora la qualità dei prodotti e si riducono al minimo gli scarti, poiché i pezzi difettosi possono essere eliminati dalla linea prima di essere lavorati ulteriormente. I settori della produzione e della logistica sono in testa all’utilizzo dell’AI nelle applicazioni robotiche.
Robot e intelligenza artificiale guida ai cambiamenti che attendono
Tuttavia, si registrano rapidi sviluppi nell’uso dell’AI nei robot per l’assistenza sanitaria e per i servizi professionali. La sicurezza nelle applicazioni robotiche che utilizzano l’AI è attualmente garantita da algoritmi deterministici codificati che hanno sempre la priorità, assicurando che il robot si fermi quando incontra un ostacolo. Questa situazione potrebbe cambiare con la diffusione dell’AI nella robotica e i ricercatori stanno studiando come consentire l’uso di AI “affidabile” nei componenti critici per la sicurezza delle applicazioni robotiche.
Figure AI: chi è e cosa fa la startup attiva nella robotica e AI
Startup californiana che lavora alla creazione di robot umanoidi avanzati. Ha ricevuto un finanziamento da 675 milioni di dollari; tra gli investitori Nvidia e Jeff Bezos, quest’ultimo con un investimento di 100 milioni di dollari. Ha un team composto da ex dipendenti di aziende all’avanguardia come Tesla e Boston Dynamics. La valutazione pre-money di Figure AI era di 2 miliardi di dollari.

Il punto di forza di Figure AI è il robot umanoide chiamato Figure 01. La particolarità di questo robot risiede nel modello linguistico di OpenAI, che ne alimenta le capacità di visione e linguaggio.
Lo sviluppo di modelli multimodali VLAM
Un passo fondamentale verso l’applicazione dell’AI ai robot è stato lo sviluppo di modelli “multimodali” – modelli di AI addestrati su diversi tipi di dati. Ad esempio, mentre un modello linguistico viene addestrato utilizzando una grande quantità di testo, i “modelli linguistico-visivi” vengono addestrati anche utilizzando combinazioni di immagini (fisse o in movimento) in concerto con le corrispondenti descrizioni testuali. Questi modelli imparano la relazione tra i due elementi, consentendo loro di rispondere a domande su ciò che sta accadendo in una foto o in un video, o di generare nuove immagini in base a richieste di testo.
I nuovi modelli utilizzati nella robotica fanno un ulteriore passo avanti. Questi “modelli di visione-linguaggio-azione” (VLAM) recepiscono testi e immagini, oltre ai dati relativi alla presenza del robot nel mondo fisico, tra cui le letture dei sensori interni, il grado di rotazione delle diverse articolazioni e le posizioni degli attuatori (come le pinze o le dita delle mani di un robot). I modelli risultanti possono quindi rispondere a domande su una scena, come “riesci a vedere una mela?”. Ma possono anche prevedere il modo in cui il braccio di un robot deve muoversi per raccogliere quella mela, e come questo influenzerà l’aspetto del mondo.
In altre parole, un vlam può fungere da “cervello” per robot con ogni tipo di corpo, sia che si tratti di giganteschi bracci fissi in fabbriche o magazzini, sia di robot mobili con gambe o ruote. E a differenza degli LLM, che manipolano solo il testo, i vlam devono mettere insieme diverse rappresentazioni indipendenti del mondo, in testi, immagini e letture di sensori. Questo modo di fondare la percezione del modello sul mondo reale riduce notevolmente le “allucinazioni” (la tendenza dei modelli AI a inventare e sbagliare le cose).
RFM-1 di Covariant
L’azienda Covariant ha creato un modello chiamato rfm-1, addestrato utilizzando testi, immagini e dati di oltre 30 tipi di robot. Il suo software viene utilizzato principalmente insieme ai robot “pick and place” nei magazzini e nei centri di distribuzione situati in aree suburbane dove il terreno è economico, ma la manodopera è scarsa. Covariant non produce l’hardware in sé, ma il suo software viene utilizzato per aggiornare il cervello dei robot esistenti.

Apprendimento zero-shot
L’uso di questi nuovi modelli per controllare i robot presenta diversi vantaggi rispetto agli approcci precedenti, afferma Marc Tuscher, cofondatore di Sereact, una startup di robotica. Uno dei vantaggi è l‘apprendimento “a colpo zero” (zero shot), che in gergo tecnico indica la capacità di fare una cosa nuova, come “raccogliere il frutto giallo”, senza essere addestrati esplicitamente a farlo. La natura multimodale dei modelli vlam garantisce ai robot un livello di senso comune e di conoscenza del mondo senza precedenti, come ad esempio il fatto che le banane sono gialle e sono un tipo di frutta.

Apprendimento nel contesto
Un altro vantaggio è l’“apprendimento nel contesto”, ovvero la possibilità di modificare il comportamento di un robot utilizzando suggerimenti testuali, piuttosto che una riprogrammazione elaborata. Tuscher fa l’esempio di un robot di magazzino programmato per smistare i pacchi, che si confondeva quando le scatole aperte venivano erroneamente inserite nel sistema. Per fargliele ignorare sarebbe stato necessario riqualificare il modello. “Oggi gli diamo un suggerimento – ignorare le scatole aperte – e lui sceglie solo quelle chiuse”, dice Tuscher. “Possiamo cambiare il comportamento del nostro robot dandogli un suggerimento, il che è pazzesco”. In effetti, i robot possono essere programmati da supervisori umani non specializzati utilizzando un linguaggio ordinario, piuttosto che un codice informatico.
Questi modelli possono anche rispondere in modo gentile. “Quando il robot commette un errore, è possibile interrogarlo e lui risponde in forma di testo”, spiega Chen. Questo è utile per il debug, perché è possibile fornire nuove istruzioni modificando il prompt del robot, dice Tuscher. “Si può dire al robot: ‘questo non va bene, per favore fallo in modo diverso in futuro'”. Ancora una volta, questo rende i robot più facili da usare per i non specialisti.
L’applicazione nelle auto a guida autonoma
La possibilità di chiedere a un robot cosa sta facendo e perché è particolarmente utile nel campo delle auto a guida autonoma, che sono in realtà solo un’altra forma di robot. Wayve, una startup di veicoli autonomi con sede a Londra, ha creato un vlam chiamato Lingo-2. Oltre a controllare l’auto, il vlam è anche in grado di controllare il veicolo. Oltre a controllare l’auto, il modello è in grado di comprendere i comandi testuali e di spiegare le motivazioni alla base delle sue decisioni.
Ad esempio, è possibile chiedere al modello qual è il limite di velocità e quali spunti ambientali (come cartelli e segnaletica stradale) ha utilizzato per arrivare alla risposta. “Possiamo verificare che tipo di contesto è in grado di comprendere e di vedere”, spiega.
Come per altre forme di AI, l’accesso a grandi quantità di dati di addestramento è fondamentale. Covariant, che è stata fondata nel 2017, ha raccolto per molti anni i dati delle sue implementazioni esistenti, che ha utilizzato per addestrare l’rfm-1. I robot possono anche essere guidati manualmente per eseguire un particolare compito alcune volte, con il modello che poi generalizza dai dati risultanti, un processo noto come “apprendimento per imitazione”.
Il progetto Mobile aloha
Ma questa non è l’unica opzione. Un progetto di ricerca dell’Università di Stanford, chiamato Mobile aloha, ha generato dati per insegnare a un robot le attività domestiche di base, come fare il caffè, utilizzando un processo noto come teleoperazione del corpo intero – in breve, una marionetta. I ricercatori si sono posizionati dietro il robot e hanno mosso direttamente i suoi arti, consentendogli di percepire, apprendere e quindi replicare una particolare serie di azioni. Questo approccio, sostengono, “consente alle persone di insegnare ai robot abilità arbitrarie”.
Chelsea Finn, una professoressa di Stanford che ha supervisionato il progetto Mobile aloha, è anche una delle co-fondatrici di Physical Intelligence, una startup che ha recentemente raccolto 70 milioni di dollari da finanziatori tra cui Openai. Skild, una startup di robotica nata dalla Carnegie Mellon University, avrebbe raccolto 300 milioni di dollari in aprile. Figure, che si concentra sui robot umanoidi, ha raccolto 675 milioni di dollari a febbraio; Wayve ha raccolto 1,05 miliardi di dollari a maggio, il più grande round di finanziamento di sempre per una startup europea di AI.
Kendall di Wayve sostiene che il crescente interesse per i robot riflette l’ascesa dell'”AI incarnata”, in quanto i progressi del software di AI vengono applicati a hardware che interagiscono con il mondo reale. “L’AI è molto di più dei chatbot”, afferma. “Tra un paio di decenni, la gente penserà a questo quando penserà all’AI: macchine fisiche nel nostro mondo”.
I ricercatori affermano che, con il miglioramento del software per la robotica, l’hardware sta diventando il fattore limitante, in particolare quando si tratta di robot umanoidi (vedi articolo successivo). Ma quando si tratta di cervelli robotici, conclude Chen, “stiamo facendo progressi sull’intelligenza molto rapidamente”. ■
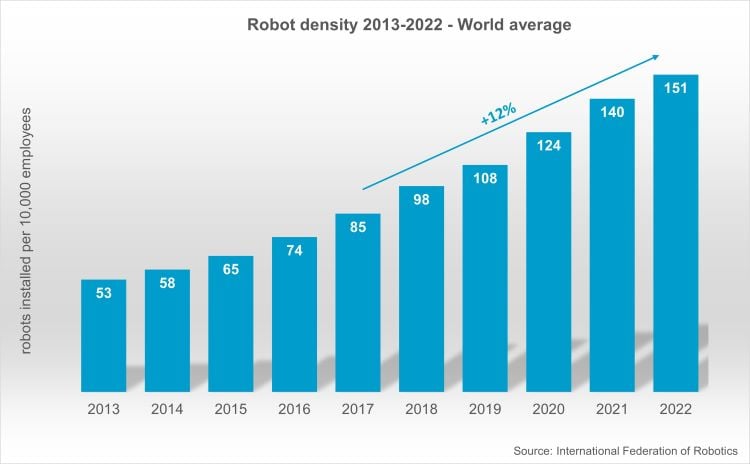
Mercato mondiale della robotica: 3,9 mln di installazioni alla fine del 2022
Spinto dall’elevato volume di installazioni di robot industriali, il mondo ha raggiunto un nuovo record di 3,9 milioni di robot operativi nel 2022. I principali paesi più automatizzati misurati in base alla densità di robot sono: Repubblica di Corea (1.012 robot per 10.000 dipendenti), Singapore (730 unità) e Germania (415 unità). È quanto emerge dal rapporto World Robotics 2023, presentato da IFR il 1° gennaio 2024.
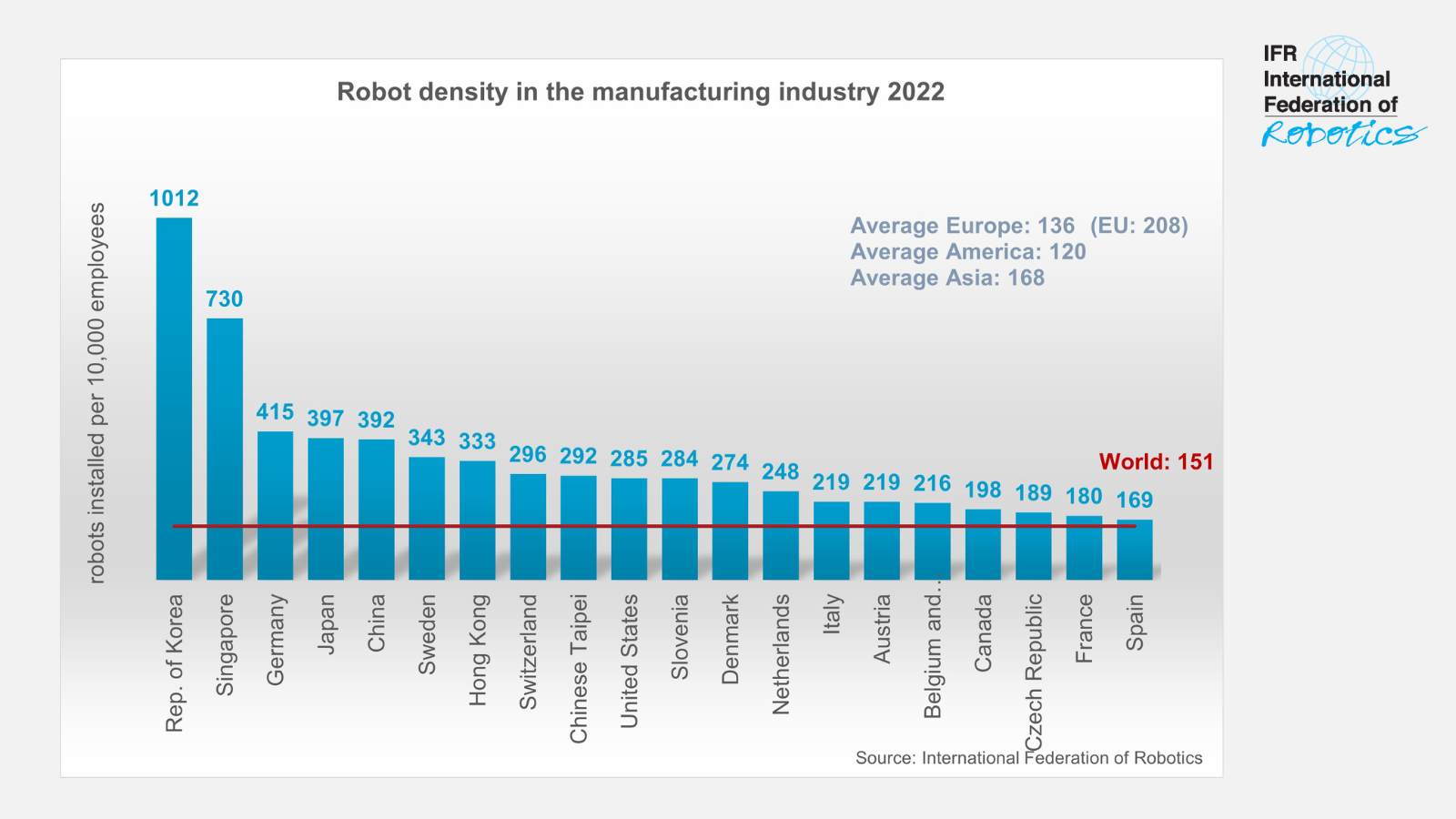
Densità dei robot per regione
L’Asia ha una densità di robot di 168 unità ogni 10.000 dipendenti nell’industria manifatturiera. Su scala globale, le economie di Corea, Singapore, Giappone, Cina continentale, Hong Kong e Taipei cinese si collocano tutte tra i primi dieci paesi più automatizzati.
L’Unione Europea ha una densità di robot di 208 unità ogni 10.000 dipendenti, con Germania, Svezia e Svizzera che si collocano nella top ten globale.
La densità di robot del Nord America è di 188 unità ogni 10.000 dipendenti. Gli Stati Uniti sono tra i primi dieci paesi più automatizzati nell’industria manifatturiera.
Paesi principali
La Repubblica di Corea è il primo al mondo ad adottare robot industriali. Dal 2017 la densità dei robot è aumentata in media del 6% ogni anno. L’economia coreana beneficia di due grandi clienti: una forte industria elettronica e un’industria automobilistica distinta.
- Singapore con 730 robot ogni 10mila dipendenti. Singapore è un piccolo paese con un numero molto basso di dipendenti nell’industria manifatturiera.
- Germania (415 robot ogni 10.000 dipendenti) è al terzo posto. La densità di robot della più grande economia europea è cresciuta del 5% CAGR dal 2017.
- Giappone è al quarto posto (397 unità). La densità del paese produttore di robot predominante al mondo è cresciuta in media del 7% ogni anno (2017-2022).
- Cina è salita al quinto posto nel 2021 e ha mantenuto questa posizione nel 2022. I massicci investimenti del paese nella tecnologia di automazione producono un’elevata densità di robot di 392 robot ogni 10.000 dipendenti, nonostante un’enorme forza lavoro di circa 38 milioni di persone nell’industria manifatturiera.
- Stati Uniti, la densità è passata da 274 unità nel 2021 a 285 nel 2022. Il paese è al decimo posto nel mondo.