I robot chirurgici fanno parte di un settore dell’ingegneria biomedica che si è sviluppato di recente. Come si può intuire dal termine, riguarda l’applicazione di metodiche e tecniche, proprie della robotica, alla chirurgia. In sostanza, si tratta di apparati di ausilio all’intervento diretto del chirurgo, che rimane sempre colui che opera.
Indice degli argomenti:
Come è costituito un robot chirurgico
Questo genere di sistemi è costituito da un robot che, per l’importanza delle applicazioni, deve soddisfare specifiche particolarmente rigorose, anche riguardo la costruzione meccanica. Un robot per la chirurgia, infatti, deve essere maneggevole e leggero, e al tempo stesso poter garantire un grado di libertà adeguato a rendere possibili movimenti di una certa complessità.
La posizione e l’orientamento dell’organo effettore del robot (ossia lo strumento che effettua materialmente l’operazione chirurgica) devono essere definiti con grande precisione; il robot deve infatti poter essere manovrato dal chirurgo in modo da ottenere il posizionamento più accurato possibile dell’organo effettore. Questo può consistere in un “dispositivo portautensile”, variabile a seconda dell’intervento da effettuare; ad esempio, bisturi, trapano, laser e altro ancora.
La robotica è stata applicata per prima nella microchirurgia, nella chirurgia cerebrale, nella radiochirurgia e nella chirurgia ortopedica; viene utilizzata proprio per quelle parti dell’intervento in cui è richiesta una elevata precisione, ad esempio in associazione al bisturi laser o per fissare chiodi, punti metallici o altro.
Il robot opera in associazione con un sistema di ricostruzione virtuale, che consente di mettere in relazione misure geometriche relative alla zona sulla quale deve essere effettuato l’intervento e immagini reali della zona stessa. Si ricorre pertanto a una rappresentazione tridimensionale della zona di operazione, grazie alla quale è possibile simulare la posizione e la direzione di avanzamento dell’utensile che effettua l’intervento, così da definire esattamente la posizione in cui il robot deve portare il suo organo effettore e programmarne opportunamente e precisamente i movimenti.
Robot chirurgici, campi di applicazione principali
La prima specialità chirurgica a usufruire della guida robotica attraverso le immagini è stata la neurochirurgia cerebrale, da principio con la chirurgia stereotassica. Il procedimento prevede infatti l’uso di un casco stereotassico, posto sul cranio del paziente, le cui misure, insieme a immagini tridimensionali (lastre a risonanza magnetica, tomografie assiali ecc) permettono di posizionare esattamente la lesione e di pianificare il percorso dello strumento chirurgico nel cervello. Queste nuove tecniche, guidate dalle immagini, utilizzano marker meno invasivi o immagini video del paziente per creare la corrispondenza fra le immagini della lesione e i riferimenti anatomici del paziente sul quale si sta operando.
L’applicazione dei robot per chirurgia si è poi diffusa ad altri settori, come la chirurgia ortopedica (dell’anca e del ginocchio ad esempio), la chirurgia toracica e, in generale, alla chirurgia mini-invasiva. Uno dei vantaggi dell’utilizzo dei robot chirurgici, infatti, è quello di poter operare con estrema precisione in modo meno invasivo rispetto alle tecniche tradizionali.
Ulteriori sviluppi dei robot chirurgici
Un ulteriore sviluppo della robotica chirurgica è previsto con l’evoluzione delle tecniche della realtà virtuale e anche della telemedicina. Si prefigura uno scenario in cui il chirurgo, indossando un casco, dei guanti o altri dispositivi dei sistemi di realtà virtuale, potrà addirittura operare a distanza, senza trovarsi fisicamente, cioè, in sala operatoria; grazie agli stimoli sensoriali che riceve e all’utilizzo di strumenti telecomandati (robot appunto). Sia il chirurgo, sia il robot che effettua materialmente l’intervento, sono dotati di sensori ed effettori che permettono di riprodurre fedelmente a distanza e in tempo reale sia stimoli sensoriali sia azioni; in questo modo, il chirurgo riceve dal robot le informazioni prese dalla realtà, come suoni, stimoli propriocettivi, immagini stereoscopiche in 3D, e sulla base di queste comanda a distanza il robot.
Questo genere di sistemi sono in uso già da alcuni anni e permettono una rappresentazione automatica della posizione degli strumenti chirurgici sul piano operatorio, così da poter essere utilizzati per la pianificazione di un intervento chirurgico, prima di effettuarlo davvero; similmente ai “simulatori di volo” utilizzati per la pratica dei piloti. L’operazione viene fatta virtualmente, verificando traiettorie, posizioni dei vasi sanguigni e altro, così da prevenire eventuali imprevisti che potrebbero verificarsi durante l’intervento chirurgico reale.
Alcuni gruppi di ricercatori stanno lavorando su soluzioni che sanno di fantascienza, come i microrobot operatori, aventi le stesse capacità dei robot chirurgici (in grado cioè di effettuare alcuni tipi di interventi) ma così piccoli da raggiungere l’organo da operare attraverso i vasi sanguigni.
Cos’è la chirurgia robotica?
La chirurgia robotica può essere definita come lo stato dell’arte delle innovazioni tecnologiche applicate alle tecniche chirurgiche. Definita anche come “telemanipolazione computer-assistita”, la chirurgia robotica opera attraverso l’ausilio di una piattaforma chirurgica che è in grado di riprodurre i movimenti della mano del chirurgo all’interno del corpo umano.
Il primo intervento di chirurgia robotica risale al 2001, a opera del chirurgo Jacques Marescaux. Si trattò, per la precisione, di un intervento di colecistectomia, che fu effettuato in telechirurgia transatlantica: il chirurgo si trovava a New York e il paziente a Strasburgo, 6.200 km. Fu adoperato il sistema Zeus. Uno dei pionieri della chirurgia robotica è stato il professor Ugo Boggi. Un centro di eccellenza di chirurgia robotica si trova a Grosseto ed è stato fondato dal professor Pier Cristoforo Giulianotti; qui si formano chirurghi di varie specializzazioni: generali, urologi, ginecologi, provenienti dall’Italia e da altre parti del mondo.
Che cos’è la robotica biomedica
Come già accennato, i robot chirurgici fanno parte della robotica biomedica (o bioingegneria o ingegneria biomedica). Si tratta della disciplina che utilizza le metodologie e le tecnologie proprie dell’ingegneria per comprendere e risolvere problematiche medico-biologiche. L’ingegneria biomedica prevede quindi una stretta collaborazione fra specialisti dei vari settori: fisici, ingegneri, medici e biologi.
L’ingegneria biomedica nasce da applicazioni di varie discipline (meccanica, chimica, elettronica) sviluppatesi autonomamente all’interno del proprio ambito, e sfociate poi nella biomeccanica, nella biochimica, nei biomateriali, nell’elettrofisiologia, nella neurofisiologia, nelle scienze cognitive, nella biosistemistica.
Oggi l’ingegneria biomedica si è consolidata come disciplina autonoma, come applicazione di discipline ingegneristiche alla biologia e alla medicina.
Il percorso di studi prevede molte diramazioni: si va dall’ingegneria per cellule e tessuti, che si occupa della ricerca nell’ambito degli organi artificiali, alla neuroingegneria, che studia i sistemi neurali e cognitivi; dalle tecnologie elettroniche per la progettazione di dispositivi e strumentazioni elettromedicali all’ingegneria per immagini e segnali biomedici.
Infine, sono frutto della bioingegneria le protesi ortopediche, il cuore artificiale miniaturizzato, la mano bionica dotata di senso del tatto e il robot per chirurgia mini-invasiva “Da Vinci”.
Chi ha inventato il robot Da Vinci?
Il sistema chirurgico robotizzato Da Vinci è stato creato dalla Intuitive Surgical, azienda con sede nella Silicon Valley, alla fine degli anni Novanta. Il primo sistema, IS1200 detto Standard, nel 2000 ha ottenuto dall’ente americano Food and Drug Administration (FDA) l’autorizzazione per l’utilizzo nella chirurgia laparoscopica. Successivamente ne fu autorizzato l’uso in chirurgia toracica, cardiaca, vascolare, urologica, ginecologica e otorinolaringoiatrica. In Italia, inizialmente è stato utilizzato per diversi tipi di intervento, tra cui alcuni tipi di ernia. Attualmente viene utilizzato per una molteplicità di interventi chirurgici, da quelli urologici e ginecologici a quelli ortopedici, fino alla cardiochirurgia, con il grosso vantaggio di poter operare senza aprire il torace, semplicemente praticandovi dei fori.
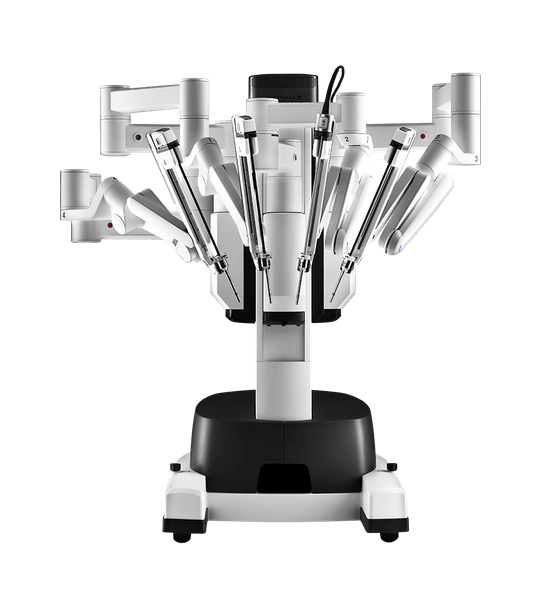
Da Vinci X ©[2021] Intuitive Surgical, Inc.
Nel 2006 è stato prodotto il sistema Da Vinci S (IS2000) e nel 2009 la versione Da Vinci SI HD (IS3000). Nel 2014, Intuitive Surgical ha lanciato la quarta generazione, il Da Vinci XI HD (IS4000).
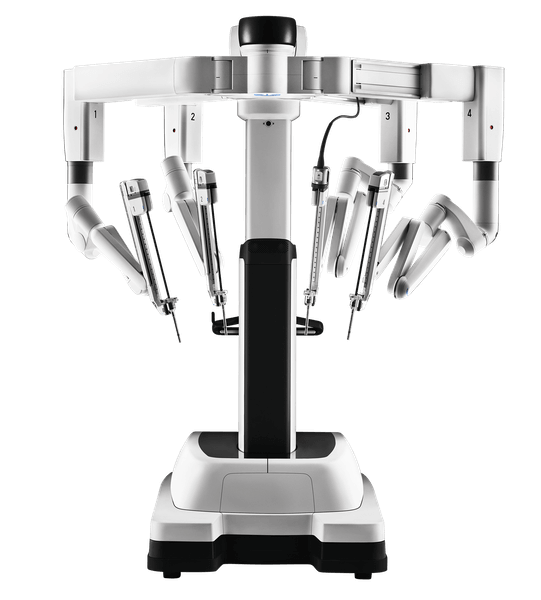
Da Vinci XI ©[2021] Intuitive Surgical, Inc.
Come funziona il robot Da Vinci e quanto costa?
Attualmente, il robot chirurgico da Vinci XI è la piattaforma più avanzata per la chirurgia robotica mininvasiva. Introdotto in Italia nel 2014, è uno strumento ideale per la chirurgia ad alta complessità in campi chirurgici ampi e multi-quadrante. Le sue carat

teristiche lo rendono adatto per gli interventi in ambito urologico, ginecologico e di chirurgia generale complessa, massimizzando gli accessi anatomici e garantendo una visione 3D-HD.
Il suo funzionamento si basa su tre componenti principali:
- console chirurgica: costituisce il centro di controllo di tutto il sistema, tramite il quale il chirurgo, per mezzo di due manipolatori e di pedali, controlla la fibra ottica e gli strumenti operatori;
- carrello paziente: si tratta del componente operativo del sistema Da Vinci. Si compone di quattro bracci mobili e interscambiabili, dedicati al supporto della fibra ottica e di strumenti che possono andare da 5 mm fino a un massimo di 8 mm;
- carrello visione: supporta l’unità centrale di elaborazione dell’immagine.
Il sistema Da Vinci XI funziona traducendo i movimenti del chirurgo in modo intuitivo. Al medico è consentito un controllo completo della fibra ottica e degli strumenti, in modo da evitare complessi movimenti laparoscopici.
Il sistema permette una visione tridimensionale del campo operatorio, grazie alla quale il chirurgo viene “immerso” nel campo, senza l’ausilio di occhiali o altro, di modo che possa valutare al meglio i piani di dissezione anatomici e operare come se si trovasse all’interno del corpo del paziente.
Uno dei pochi svantaggi dell’impiego dei robot chirurgici è il loro costo: quello del robot Da Vinci è intorno ai 3 milioni di euro.
Robot chirurgici, campi di applicazione principali
La chirurgia robotica viene attualmente impiegata in quasi tutte le patologie risolvibili con il bisturi. Ecco le principali.
Chirurgia robotica ginecologica
L’utilizzo del robot chirurgico nella ginecologia assomma i vantaggi sia dell’approccio laparotomico sia di quello laparoscopico, ma con minori svantaggi. Il chirurgo opera, tramite il robot, attraverso piccole incisioni di circa 1-2 cm, riducendo il dolore e i rischi associati alle ampie incisioni, per una più rapida convalescenza. L’approccio chirurgico robotizzato è indicato per molte patologie, sia benigne (come miomi, endometriosi, etc), sia maligne dell’apparato genitale femminile (tumori della cervice uterina, dell’endometrio e anche dell’ovaio). L’asportazione dell’utero mediante chirurgia robotizzata, ad esempio, offre molti vantaggi rispetto alle tradizionali modalità chirurgiche, soprattutto nei casi di isterectomia (per neoplasia cervicale) e di linfoadenectomia.
Chirurgia robotica urologica
Le patologie trattate in campo urologico con la tecnica robotica sono: il tumore prostatico e altri tumori urologici (rene, surrene e vescica). I vantaggi sono assimilabili a quelli dell’impiego dei robot in ginecologia.
Chirurgia robotica della tiroide
Il robot chirurgo Da Vinci viene impiegato con successo anche nella chirurgia della tiroide. Sono stati infatti effettuati i primi interventi “trans-orali”, ovvero senza praticare tagli sul collo. I vantaggi della tecnica utilizzata riguardano il sanguinamento (ridotto), l’ospedalizzazione, le cicatrici, il rischio di complicanze post-operatorie; infine, la perfezione nelle suture, grazie alla possibilità di visione tridimensionale del campo operatorio e di rotazione a 360° delle pinze manovrate dal chirurgo alla consolle e l’assenza di rischio di tremore dei polsi. Nel caso della tiroide non esistono alternative mini-invasive per trattare l’area anatomica con la stessa delicatezza e precisione del robot. Neanche le procedure microscopiche laser assistite, infatti, garantiscono gli stessi vantaggi e benefici offerti dal robot Da Vinci.
Qual è la differenza tra laparoscopia e robotica?
L’intervento tramite robot chirurgico non differisce molto da quello laparoscopico, per quanto riguarda le incisioni che vengono eseguite sul paziente. Ciò che cambia, a favore dell’intervento robotico, è la precisione con cui gli strumenti – che sono inseriti attraverso i trocars – possono essere comandati all’interno del corpo e la qualità della visione a disposizione del chirurgo per esplorare il campo operatorio. L’uso del robot, aumentando l’abilità a eseguire manovre intracorporee, consente di effettuare con tecnica mini invasiva interventi che prima sarebbero stati eseguibili solo con una laparotomia più estesa. In pratica, è quasi come se le mani del chirurgo fossero miniaturizzate e inserite nel corpo del paziente, con tutta la libertà di movimento.
Quali sono i vantaggi dei robot chirurgici
I vantaggi di operare tramite robot riguardano sia il chirurgo sia il paziente.
Il chirurgo opera in una posizione comoda, seduto, con una riduzione della tensione muscolare; durante interventi lunghi e complessi, ciò gli consente di mantenere un’attenzione maggiore durante tutto l’intervento.
Risulta di particolare utilità il sistema definito immersive intuitive interface, che permette di:
- tradurre i movimenti del chirurgo in modo intuitivo: durante l’intervento si evitano i complessi movimenti laparoscopici, grazie al pieno controllo dello strumento e della fibra ottica;
- avere una visione tridimensionale del campo operatorio: grazie all’ausilio delle immagini in 3D e ad alta definizione, che possono essere ingrandite fino a 10 volte. Il chirurgo viene immerso nel campo operatorio e può avere una visione precisa, fin nei dettagli, della parte anatomica oggetto dell’intervento.
Durante l’intervento, la posizione dei bracci robotici non è casuale, ma viene ottimizzata attraverso un puntatore laser. Ne risultano movimenti fluidi, senza scatti. Operare tramite robot permette inoltre di eliminare i fisiologici tremori della mano del chirurgo e di ridurre i tempi di esecuzione dell’intervento vero e proprio. Il robot Da Vinci, inoltre, opera praticando solo piccole incisioni sulla pelle, con il risultato di tempi di guarigione più brevi e solo piccole cicatrici.
Durante l’intervento con robot è richiesta una minore necessità di trasfusioni, perché si riduce la perdita di sangue nel paziente.
Ci sono vantaggi evidenti anche nel decorso post-operatorio: l’impiego del robot Da Vinci permette di ridurre i tempi di ospedalizzazione, fino a dimezzarli, e consente al paziente di ritornare alle attività quotidiane in tempi più brevi, grazie anche a un ridotto dolore post-operatorio.
Chirurgia robotica in Italia
Nel 2017 gli interventi di chirurgia robotica in Italia sono stati circa 18mila, di cui quasi 12mila in ambito urologico. Attualmente sono cento i robot Da Vinci operanti in tutto il territorio nazionale, suddivisi in quasi tutte le regioni, anche se persiste una netta prevalenza del Nord. La Lombardia ne ha 22, la Toscana 13, il Veneto 12. Al Sud sono meno diffusi: Basilicata e Calabria ne hanno solo uno per ciascuna.
Per l’utilizzo di questi sistemi a tecnologia avanzata occorre puntare molto sulla formazione: basti pensare che per formare un chirurgo a operare tramite robot occorrono dalle 30 alle 40 sedute.