- I robot sono macchine programmabili capaci di eseguire compiti complessi, spesso meglio degli esseri umani. Utilizzati in settori come quello medico e industriale, la loro presenza nella vita quotidiana è cresciuta notevolmente, rendendoli sempre più comuni.
- I robot sono macchine ideali per compiti che richiedono ripetitività, velocità e precisione, i robot possono svolgere operazioni complesse come trasportare oggetti e assemblare parti meccaniche. Con l’intelligenza artificiale, possono adattarsi a nuove situazioni e fornire vantaggi aziendali significativi in termini di risparmio di tempo e costi.
- Tendenze nella robotica per il 2025: secondo l’IFR, le cinque principali tendenze sono l’intelligenza artificiale e l’apprendimento automatico, l’espansione dei cobot a nuove applicazioni, i manipolatori mobili, i gemelli digitali e i robot umanoidi. Questi sviluppi promettono di ampliare ulteriormente l’uso e le capacità dei robot in vari settori.
La definizione di “robot” è del 1979 e si deve al Robot Institute of America: «un robot è un manipolatore riprogrammabile e multifunzionale progettato per spostare materiali, componenti, attrezzi o dispositivi specializzati attraverso vari movimenti programmati per la realizzazione di vari compiti».
Indice degli argomenti:
Cos’è un robot: definizione ed etimologia
In questa visione, il robot è considerato come una macchina in grado di aiutare l’uomo nei lavori più gravosi, dotata di una “intelligenza” ancora limitata, ovvero “programmabile”, incapace di prendere decisioni autonome, quindi, ma solo in grado di eseguire degli ordini scritti sotto forma di codice. Insomma, il robot non sarebbe altro che una macchina presente nella catena di montaggio delle fabbriche maggiormente tecnologizzate.
Si tratta, comunque, della prima definizione “moderna” del termine, se si considera che lo studio della robotica era iniziato ai primi del Novecento, con dispositivi elettromeccanici controllati e telecomandati dall’uomo. Quanto all’etimologia del termine, molti sapranno che la parola ‘robot’, nella sua accezione più moderna, è stata utilizzata per la prima volta dallo scienziato e scrittore Isaac Asimov nel suo Runaround, del 1942, nel quale, fra l’altro, sono riportate le famose leggi della robotica (ri-pubblicate in Handbook of Robotic). Nel suo successivo romanzo, intitolato Io, Robot, Asimov anticipa, rispetto ai progressi della tecnologia, il tema dei “geminoidi“, ossia robot fatti a immagine e somiglianza degli umani (fino addirittura a diventarne dei cloni).
Il nome da attribuire alla macchina in grado di svolgere il lavoro di un essere umano (e in alcuni casi, di averne anche le sembianze) non lo aveva scelto lui, però, ma il drammaturgo ceco Karel Capek, che in una sua opera teatrale del 1921 – R.U.R. (Rossum’s Universal Robots) – l’aveva usata per primo. In lingua ceca “robota” significa ‘lavoro pesante’ o ‘lavoro forzato’. I robot immaginati e messi in scena da Capek, però, non erano elettromeccanici ma dei veri e propri servitori creati mediante procedimenti chimico-biologici.
Vale la pena tornare sulle leggi della robotica. Inizialmente erano tre, in seguito è stata aggiunta una legge 0; esse codificano le norme etico/comportamentali nei confronti dell’umanità, che un qualsiasi robot deve rispettare, definiscono il perimetro d’azione all’interno della società, in modo tale che essa ne possa trarre beneficio senza esserne minacciata.

Robot: le 5 tendenze top del 2025
Ecco quali sono le 5 tendenze nella robotica secondo l’IFR
- Intelligenza artificiale e apprendimento automatico
- I cobot si espandono a nuove applicazioni
- Manipolatori mobili
- Gemelli digitali (Digital twins)
- Robot umanoidi
Le leggi della robotica di Isaac Asimov
Un robot:
- non deve provocare danno all’umanità sia tramite la sua azione, che tramite un comportamento passivo.
- non deve ferire esseri umani o tramite la sua mancata azione consentire un danno agli stessi.
- deve obbedire agli ordini degli esseri umani, eccetto quando questi siano in contrasto con la prima legge.
- deve agire per proteggere la sua stessa esistenza fintanto che tali azioni non siano in contrasto con le prime due leggi.
Negli ultimi decenni, i robot si sono notevolmente evoluti, soprattutto grazie ai progressi dell’intelligenza artificiale, che li ha dotati di un “cervello digitale” in grado di apprendere dall’esperienza (machine learning) e di decidere con un certo margine di autonomia quali azioni intraprendere, andando quindi oltre le istruzioni codificate dai programmatori.
Ecco la definizione che ne dà l’Enciclopedia Treccani: “i robot, strutture meccano-elettriche versatili e adattabili a diverse situazioni, capaci di riprodurre varie attività elementari, rappresentano in un certo senso la materializzazione significativa e tangibile di un antico sogno dell’uomo. A essi l’uomo può trasferire l’esecuzione di attività ripetitive, faticose o pericolose, che richiedono rapidità di movimento, elevata precisione di posizionamento e ripetibilità di esecuzione”.
Sulla falsariga del Robot Institute of America anche la Società Italiana di Robotica Industriale (SIRI): “il robot è un manipolatore programmabile multiscopo per la movimentazione di materiali, di attrezzi e altri mezzi di produzione, capace di interagire con l’ambiente nel quale si svolge il ciclo tecnologico di trasformazione relativo all’attività produttiva”.
Attualmente esistono due principali tipologie:
- i robot autonomi (dotati di AI) e non autonomi (programmati). Vi sono poi, all’interno di queste, sottocategorie, come gli antropomorfi (con caratteristiche umane, come gambe, bracci e vista); gli umanoidi (anche detti androidi e geminoidi), con sembianze, oltre che caratteristiche, umane;
- i cobot (robot collaborativi), impiegati nelle fabbriche per aiutare l’operaio a svolgere mansioni molto faticose o pericolose;
- gli specializzati in alcuni campi (medicina, agricoltura, manifatturiero, lavori domestici);
- i robot software (RPA, chatbot).
Tipologie di robot (autonomi VS non autonomi)
I robot si dividono in autonomi e non autonomi. Vediamo le differenze.
Robot non autonomi
Con il termine robot non autonomi si indicano quelle macchine comandate da un software, ovvero programmate a priori per svolgere un dato compito, senza alcun margine di autonomia (fatta eccezione per i controlli automatici riservati alla sicurezza delle persone e delle cose).
Questi trovano impiego per compiti specifici, come quelli utilizzati nelle produzioni industriali lungo le catene di montaggio o i Rover per l’esplorazione della superficie di Marte. Sono sistemi in grado di svolgere le proprie funzioni, muovendosi anche in ambienti ostili (come i robot spaziali), solo perché “comandati” da software deterministico, che definisce in che modo la macchina deve “muoversi” e svolgere i propri compiti, che sono pertanto molto spesso ripetitivi, come quelli, appunto, delle catene di montaggio.
Robot autonomi
Per distinguere questa tipologia di robot dalla precedente occorre che essi soddisfino una serie ben precisa di caratteristiche: in primo luogo, la capacità di apprendimento, attraverso l’esperienza e l’interazione (AI); quindi, la possibilità di acquisire autonomia tramite le capacità sensoriali e lo scambio di dati con l’ambiente in cui si trova a operare (interconnettività) nonché il saper analizzare i dati raccolti; ha importanza anche la forma del supporto fisico del robot, che può essere modellata a sembianza di un essere umano o di un animale e riprodurne le movenze tipiche; infine, troviamo la capacità di adeguarsi all’ambiente circostante mettendo in atto comportamenti e azioni secondo precise logiche e in risposta a input esterni.
Questo tipo di robot è in grado di svolgere attività tipicamente ed esclusivamente umane, come ad esempio, apprendere dall’esperienza e prendere decisioni in modo quasi indipendente.

I robot autonomi sono realizzati attorno a un nucleo centrale costituito da una serie di processori, che eseguono degli algoritmi di intelligenza artificiale e operano effettuando delle scelte, servendosi delle reti neurali.
Vi è poi un largo l’utilizzo di sensori, per acquisire le più svariate informazioni dall’esterno: tra questi c’è la parte dedicata al riconoscimento delle immagini, basato su AI e reti neurali e dotato di varie telecamere. Ciascuna immagine catturata viene analizzata per identificare e decodificare gli elementi dello spazio fisico, persone comprese, e ricavarne informazioni che vanno a influire sul comportamento.
I robot autonomi sono largamente utilizzati nell’industria, dove assumono anche il nome di “cobot”, o collaborativi. Secondo i dati economici, se ne vendono circa 400mila l’anno.
Questo genere di robot è dotato di forti doti di autonomia. Per fare qualche esempio, deve percepire e interpretare l’ambiente in cui si trova (ad esempio per distinguere un pezzo meccanico da un altro); muoversi in sicurezza attraverso l’ambiente (ad esempio per consegnare un pezzo a un operatore umano senza entrare in collisione con altri esseri umani); decidere quali compiti svolgere e in che modo, tenendo conto delle esigenze delle persone con cui interagisce (capacità di intelligenza artificiale), ad esempio per capire quale punto sorreggere di una macchina in fase di montaggio. Infine, un robot autonomo deve anche saper gestire gli imprevisti durante l’esecuzione delle sue azioni.
Aspetti giuridici dei robot autonomi
In questi casi vanno rilevate le conseguenze sotto il punto di vista della responsabilità giuridica connessa a possibili azioni nocive compiute dal robot; in particolare, la giurisprudenza si sta interrogando se tale responsabilità sia da addebitare al possessore della macchina o al suo costruttore, non essendo – almeno finora – imputabili alla macchina stessa, privo di una figura giuridica. Se, però, il robot agisce di propria iniziativa, sulla base di algoritmi che lo governano, la responsabilità di un danno da esso causato non può essere imputata alla volontà del possessore. D’altro canto, appare difficile far rientrare la responsabilità di un comportamento scorretto del robot al suo costruttore, se questo agisce di sua iniziativa, invocando la normativa in fatto di difetto di fabbricazione. I robot autonomi, pertanto, rendono necessaria una analisi alla luce delle categorie giuridiche esistenti, e, eventualmente creandone ad hoc.
Caratteristiche costruttive comuni ai robot
Caratteristiche comuni a tutti i robot sono i processori che elaborano le informazioni ricevute dall’esterno e impartiscono ordini agli organi di movimento e di lavoro collegati, ovvero le altre componenti della macchina. In questo, l’unità logica di controllo ha una funzione assimilabile a quella di un cervello biologico.
La programmazione di un sistema robotico rispecchia questi metodi principali:
– Teaching-by-showing: la macchina impara mentre viene guidata lungo un percorso, apprendendo le posizioni raggiunte grazie ai sensori; in seguito, non fa che replicare la sequenza di posizioni appresa;
– Robot-oriented: la macchina agisce in virtù di un linguaggio di programmazione ad alto livello, con strutture dati complesse, variabili, routine;
– Object-oriented: il linguaggio è orientato agli oggetti;
– Algoritmi e tecniche di intelligenza artificiale: i robot autonomi che ne sono dotati hanno un elevato livello di indipendenza e sono in grado di apprendere per esperienza (machine learning).
In un robot vi sono poi una serie di elementi modulari, che possono essere presenti a seconda della specializzazione, come i sensori di rilevamento: distanza, luminosità, colore, suono, magnetismo, temperatura, umidità, gas, pressione, accelerazione, rotazione su uno o più assi (x,y,z), posizione assoluta Gps e relativa. I sensori servono sia per percepire dati sullo stato interno della struttura, come posizione e velocità (sensori propriocettivi), sia dati sull’ambiente esterno, come forza, prossimità e visione artificiale (sensori esterocettivi).
Una sezione è dedicata al controllo dei vari e numerosi motori (di vario tipo e dimensioni) che consentono alla macchina di eseguire azioni anche molto complesse; vi sono poi una serie di servocomandi e di attuatori.
Il robot ospita poi uno o più accumulatori di corrente, del tipo Lipo (litio-polimero), NiMH(nichel-metallo idruro), Ni-Cd (nichel-cadmio), PbA (piombo-acido), che ne permettono il funzionamento in autonomia. L’alimentazione fornita dagli accumulatori viene opportunamente trattata (ridotta o aumentata) per far fronte alle richieste delle varie parti che costituiscono il robot.
Lo spostamento può essere affidato a ruote di gomma e plastica o cingoli, oppure a vere e proprie “gambe” nel caso degli umanoidi, o zampe nel caso di artropodi.
Per svolgere le funzioni per cui è progettato, il robot dispone di uno o più bracci, con almeno tre gradi di libertà (spazio tridimensionale), spesso dotati di pinze o vere dita, per afferrare e manipolare gli oggetti. Nella robotica industriale, i robot antropomorfi (bracci robotici), hanno solitamente un minimo di sei gradi di libertà, perché possono ruotare lungo tre assi perpendicolari (avendo quindi tre ulteriori gradi di libertà). Esistono comunque robot dotati di un numero ben superiore di gradi di libertà; iCub, ad esempio, ha 53 gradi di libertà, così suddivisi:
- 7 gradi di libertà per ogni braccio robotico;
- 9 gradi di libertà per ogni mano robotica (3 per il pollice, 2 per l’indice, 2 per il dito medio, 1 per l’anello accoppiato e il dito mignolo, 1 per l’abduzione);
- 6 gradi di libertà per ogni gamba robotica;
- 6 gradi di libertà per i movimenti della testa;
- 3 gradi di libertà per il torace e la colonna vertebrale.

Il social robot R1
Un robot, poi, è un oggetto connesso, quindi è dotato di un sistema di trasmissione e ricezione dati in tempo reale; può utilizzare diversi sistemi e protocolli, come Xbee, Wi-Fi, Bluetooth, infrarossi e altri.
Infine, vi è lo chassis, o struttura portante, o “corpo” se preferiamo chiamare così l’involucro dentro il quale è racchiuso un robot antropomorfo. Può essere in metallo (alluminio, acciaio zincato) o altri materiali, come fibra di carbonio, plexiglass, policarbonato
Ambiti applicativi dei robot: industriale, medico etc.
– ambito medico/chirurgico
Una particolare applicazione dei robot è nel campo della medicina e della chirurgia. Queste macchine fanno parte dell’ingegneria biomedica, sviluppatasi di recente, e sono di ausilio all’intervento del medico chirurgo, fino ad arrivare a sostituirlo del tutto.
Un robot-chirurgo è una macchina costruita secondo canoni particolarmente rigorosi, non soltanto per quel che riguarda l’affidabilità e la potenza di elaborazione delle informazioni, ma anche per ciò che concerne la costruzione meccanica. Il chirurgo che opera tramite il robot deve infatti poterlo manovrare con estrema precisione. Il robot è fornito di un organo effettore, di norma un “dispositivo portautensile” che può essere differente a seconda dell’intervento da effettuare: bisturi, trapano, laser e altro.
Microchirurgia, chirurgia cerebrale, radiochirurgia, chirurgia ortopedica, chirurgia mini-invasiva, sono i primi campi nei quali è stata utilizzata la robotica.

Robot per chirurgia Da Vinci
L’introduzione dei robot Da Vinci e Navio e della tecnologia ibrida Artis Zeego/Theno nelle sale operatorie nell’ambito della chirurgia cardiovascolare, bariatrica e urologica, sta portando una rivoluzione nell’approccio chirurgico e negli esiti clinici. Il prossimo obiettivo è una maggiore e più dinamica robotizzazione dell’area cardiovascolare. Il sistema Corindus, di prossima introduzione, consentirà ai medici di controllare a distanza, quindi con una minore esposizione alle radiazioni, le procedure angiografiche mini-invasive, come stent e palloncini, grazie all’aiuto di imaging integrato.
Nel febbraio 2021, presso il reparto di Urologia universitaria dell’ospedale Molinette della Città della Salute di Torino, un robot chirurgico ha eseguito un intervento – perfettamente riuscito – di asportazione di un tumore maligno a un rene su una paziente che non poteva essere sedata con anestesia. Nella stessa struttura ospedaliera, già nel 2017 era stato utilizzato il robot chirurgo Da Vinci per un trapianto di rene.
Nella struttura pilota dell’Ospedale San Carlo di Nancy, a Roma, si sta sperimentando il primo robot umanoide da compagnia al mondo, in grado di riconoscere i volti e le principali emozioni umane, ottimizzato per l’interazione con esseri umani attraverso la conversazione e un touch screen. Sono oltre 2mila le organizzazioni in tutto il mondo che hanno già adottato Pepper come assistente, per accogliere, informare e orientare i visitatori.
– agricoltura
Anche l’agricoltura sta sperimentando l’utilizzo di robot autonomi per migliorare l’efficienza dei raccolti e ottimizzare il lavoro nei campi. L’ingegneria agricola parte da oltreoceano, Università dell’Illinois, dove un gruppo di ricercatori e ingegneri specializzati hanno ideato una macchina autonoma per il monitoraggio a 360 gradi delle grandi coltivazioni.

Il robot TerraSentia
Il robot, che si chiama TerraSentia, ha le sembianze di una di macchina telecomandata; riesce a muoversi tra i solchi di un campo e, attraverso l’invio di impulsi laser, a verificare lo stato di salute di ogni pianta e quello del terreno. Si tratta di capacità mai sperimentate fino a ora nel campo della coltura intensiva. Secondo quanto dichiarato dei suoi ideatori, la macchina avrebbe anche il potere di fare previsioni: riuscirebbe, infatti, a contare la quantità di chicchi di mais che ogni pianta potrebbe produrre entro la fine della stagione.
TerraSentia, infatti, “studia” ciascuna pianta, al fine di individuare il fenotipo con le caratteristiche migliori per creare nuovi ibridi. In questo modo, le nuove piante non saranno il semplice risultato di una evoluzione naturale. Si tratta di trasformazioni in grado di rivoluzionare il settore della produzione agricola massiva, poiché riducono i tempi di lavorazione e facilitano le tecniche di raccolta e lavorazione di un prodotto.
– industria
È curioso pensare che il primo robot industriale, secondo la definizione ISO, fu creato da Bill Griffith P. Taylor, nel 1937, con il sistema Meccano (quello con il quale i bambini giocavano negli anni Sessanta), azionato da un motore elettrico. Aveva cinque gradi di libertà.
Il primo a brevettarne uno fu però George Devol, nel 1954 e la prima azienda a costruirlo fu la Unimation, fondata dallo stesso Devol e da Joseph F. Engelberger nel 1956. Il robot fu chiamato Unimate ed era considerato una “programmable transfer machine”, poiché il suo scopo principale era di trasferire oggetti da un punto all’altro.

Unimate
Seguirono, poi, nel 1969 il “braccio Stanford” di Victor Scheinman, con sei gradi di libertà, che riusciva a compiere azioni complesse come assemblare e saldare. Da questo primo modello nacque in seguito il robot Puma.
L’Europa rispose, negli anni Settanta, con le creazioni di ABB Robotics (IR6) e Kuka Robotics (Famulus) immessi sul mercato nel 1973.
Il primo esempio di impiego massivo di robot in Italia si deve alla Fiat, dove si iniziò a usarli per la saldatura sulle vetture con il Robogate, invenzione italiana adottata, in seguito, da tutte le industrie automobilistiche. Un’altra applicazione ai veicoli è relativa alle operazioni di verniciatura che, almeno per vari particolari avviene grazie all’impiego di braccia automatizzate.
Il Robogate utilizzato nell’industria automotive
Da allora lo sviluppo dei robot non si è mai arrestato ed essi si sono evoluti, fino a diventare antropomorfi, aumentando sempre di più i gradi di libertà, la precisione, la velocità e la capacità di carico. Attualmente i robot svolgono, in campo industriale, lavorazioni accurate come forature, smerigliatura, fresature, verniciature, smaltature e tagli con il laser e sono dotati di sistemi di visione molto precisi. I robot antropomorfi sono impiegati nel campo automobilistico per la saldatura con sistemi laser e laser estetici con una o più sorgenti, tecnologia che consente di ridurre tempi e spazi e aumentare la qualità delle carrozzerie. Non solo: robot industriali sono usati in modo diffuso nell’industria anche per la pallettizzazione e lo stoccaggio, specialmente in aree di lavoro difficili, lavori che sarebbero molto faticosi e rischiosi per gli operai
Una interessante applicazione dei robot nell’industria è quella relativa agli Autonomous Mobile Robot (AMR), utilizzati principalmente per la movimentazione di materiali all’interno del reparto di produzione. Il vantaggio rispetto ai classici AVG è che questi non richiedono l’implementazione di alcun sistema di guida all’interno del reparto (come, ad esempio, bande magnetiche installate a terra), né la creazione di corsie dedicate al passaggio, perché sono certificati come collaborativi e quindi in grado di riconoscere ed evitare ostacoli (incluso il personale in sosta o in transito) e possono compiere le loro missioni in modo intelligente, percorrendo la rotta più corta e ricalcolando dinamicamente il percorso qualora individuino degli ostacoli o le condizioni ambientali siano temporaneamente alterate (per esempio, un pallet temporaneamente stoccato in un corridoio).
Gli autonomous mobile robot sono in grado di lavorare in flotta, scambiando in modo dinamico una serie di informazioni, quali la posizione e la velocità di tutti i robot presenti in reparto e quella di eventuali ostacoli, in modo da ottimizzare gli spostamenti di tutte le macchine. Possono essere utilizzati per l’esecuzione di missioni pre-programmate ed essere richiamati presso una postazione direttamente dall’operatore semplicemente premendo un pulsante.

Video: Autonomous Mobile Robot Milvus Robotics
Cobot
Il termine cobot deriva dalla crasi di “collaborative” e “robot”: robot collaborativi. La prima definizione si trova in un brevetto Usa del 1999, registrato per “un apparato e metodo per l’integrazione diretta tra una persona e un manipolatore generico controllato da un computer“.
Si trattava, in realtà, di un dispositivo di assistenza intelligente (IAD), antenato dei cobot moderni, frutto degli sforzi di General Motors per introdurre la robotica nel settore automobilistico. La novità, rispetto alle macchine industriali precedenti, consisteva nel fatto che il cobot poteva muoversi in un ambiente libero, non ingabbiato, per aiutare il lavoratore nelle operazioni di assemblaggio.
Il primo cobot leggero è stato introdotto nel 2004 da Kuka: il modello LBR3, frutto della collaborazione tra l’azienda e l’Istituto centrale aerospaziale tedesco, è stato il primo cobot dotato di alimentazione del movimento.
Nel 2008 è arrivato UR5, opera del costruttore danese Universal Robot, primo cobot in grado di operare in modo sicuro accanto alla forza lavoro, eliminando la necessità di barriere di sicurezza. Con UR5 si è aperta l’era dei robot collaborativi flessibili, facili da usare e dal costo abbordabile, quindi anche alla portata delle PMI. La Universal Robot è oggi leader mondiale nel settore; le altre principali aziende produttrici sono ABB, Aubo Robotics, Automata, Doosan Robotics, Fanuc, Franka Emika, Kuka AG, Precise Automation, Productive Robotics, Techman Robot e Yaskawa Motoman.
Per le loro caratteristiche di agilità, precisione, versatilità e sicurezza, i robot collaborativi rappresentano la tipologia più utilizzata, al momento, nelle industrie automatizzate.

Il cobot UR5 della Universal Robot
Robotic Process Automation
Al fianco dei classici robot “fisici”, presenti nei grandi impianti di produzione, con il progredire della tecnologia sono arrivati i robot “virtuali” (o robot software), dedicati ai servizi e alle attività di back office idonee all’automazione. La Robotic Process Automation realizza un paradigma in cui i robot, adeguatamente configurati, sono in grado di interagire con applicazioni software e svolgono una o più attività ripetitive, basate su regole, precedentemente svolte dalle persone. I robot, in pratica, emulano i passaggi fatti dall’uomo seguendo un percorso strutturato in una sequenza di comandi e questo sgrava il personale dai processi ripetitivi, consentendo di liberare capacità cognitiva, lasciando agli uomini tempo per svolgere compiti più intelligenti e più adatti alle strategie dell’azienda.
– in ambito domestico
I robot domestici, più comunemente chiamati personal o social (a seconda dei compiti che svolgono) hanno come elemento distintivo il fatto di operare all’interno delle mura domestiche, o di strutture similari (come le case di riposo). I loro scopi possono essere: fare compagnia alle persone, svolgere faccende domestiche, intrattenere i bambini, fino ad arrivare alla gestione della smart home e alla sorveglianza. Ecco allora robot da cucina, aspirapolvere, tagliaerba, da giardino e così via. In uno studio, la ABI Research stima un fatturato globale, per questa categoria di robot, di 23 miliardi di dollari entro il 2026.

Tra i robot domestici (o social) citiamo Aido, dotato di riconoscimento biometrico grazie al quale è in grado di sapere con chi si sta relazionando all’interno della famiglia.

Alpha 2, invece, è un umanoide molto simile a Nao prodotto dalla Softbank Robotics, una delle aziende di robotica domestica più famose al mondo. Alpha 2 è un “family robot”, cioè pensato per fare compagnia, intrattenere e assistere le famiglie. Ha braccia e gambe e riesce a muoversi liberamente; è equipaggiato di videocamera e sensori che gli consentono di rilevare suoni e immagini, nonché sensori per controllare movimento, inclinazione ed eventuali urti.
Amy è un social robot che fornisce un vero aiuto in casa: suggerisce ricette di cucina e modalità di preparazione dei cibi, può sorvegliare gli animali domestici e controllare i bambini, ricordare appuntamenti e scadenze, fare la guardia quando si lascia l’abitazione. Amy è in grado di conversare, anche se in modo alquanto limitato, per cui potrebbe essere impiegato anche per l’accoglienza dei clienti, per esempio in alberghi, ristoranti o negozi, sebbene non abbia né braccia né gambe e al posto della testa abbia un display simile a un tablet.
Il robot Pepper
Uno dei social più evoluti è Pepper. È un umanoide, alto circa un metro e 20 centimetri, dal corpo esile e la testa rotonda, con due grandi occhi tondi che ricordano quelli di un bambino e suscitano quindi empatia. Prodotto da Softbank Robotics, viene venduto anche nella versione “business”, con alcune funzionalità pre-integrate che lo rendono adatto a compiti di reception o di accoglienza di ospiti e clienti, oltre che di amico della famiglia. Pepper, infatti, riesce a interagire in modo naturale con le persone, riconoscendo non solo i volti ma anche le espressioni e le emozioni umane.
Robotica e intelligenza artificiale
L’intelligenza artificiale ha un grande potenziale per la robotica, consentendo una serie di vantaggi in settori diversi come la produzione e la sanità. Sebbene l’AI stia già lasciando il segno nella robotica, il suo sviluppo avviene a un ritmo molto più lento e in un campo di applicazione molto più ristretto di quanto si pensi.

L’obiettivo principale dell’utilizzo dell’AI nella robotica è quello di gestire meglio la variabilità e l’imprevedibilità dell’ambiente esterno, sia in tempo reale che off-line. Ciò offre vantaggi per i produttori, i fornitori di logistica e i rivenditori che hanno a che fare con prodotti, ordini e scorte che cambiano frequentemente in ambienti cosiddetti “ad alto mix/basso volume”. Inoltre, aiuta i robot a funzionare in ambienti pubblici – dai supermercati agli ospedali – che sono intrinsecamente imprevedibili. L’intelligenza artificiale non è necessariamente un prerequisito per gestire la variabilità e l’imprevedibilità. Ad esempio, semplici applicazioni di pick and place con variazioni nel posizionamento del prodotto, ma non nel prodotto stesso, possono essere realizzate senza AI. Anche la mobilità dei robot non richiede l’intelligenza artificiale.
Tuttavia, maggiore è la variabilità e l’imprevedibilità dell’ambiente, più è probabile che gli algoritmi di AI forniscano una soluzione rapida ed economica, ad esempio per i produttori o i grossisti che hanno a che fare con milioni di prodotti diversi che cambiano regolarmente. L’AI è utile anche in ambienti in cui i robot mobili devono distinguere tra gli oggetti o le persone che incontrano e rispondere in modo diverso.
Si distinguono due categorie principali di applicazioni:
- Applicazioni sense-and-respond, in cui il robot identifica e risponde autonomamente all’ambiente esterno in un ciclo chiuso in tempo reale.
- Ottimizzazione delle prestazioni, in cui l’intelligenza artificiale viene utilizzata per ottimizzare la progettazione dei processi e la programmazione dei robot, nonché per migliorare l’ispezione e la manutenzione della qualità.
Le applicazioni pick-and-place sono il tipo di applicazione sense-and-respond più adottato nella produzione e nella logistica. Il pick-and-place copre un’ampia gamma di applicazioni, tra cui la pallettizzazione, l’imballaggio e la gestione delle macchine. Altre applicazioni manifatturiere in fase iniziale di adozione dell’intelligenza artificiale sono l’assemblaggio e la saldatura. L’intelligenza artificiale ha un notevole potenziale per accelerare la progettazione e la programmazione dell’automazione robotizzata, anche se si tratta di una fase iniziale di sviluppo.
L’intelligenza artificiale potrebbe contribuire a ridurre in modo significativo il costo complessivo dell’installazione e della riprogrammazione di un’applicazione robotizzata, secondo alcuni esperti anche del 50%. Ciò contribuisce a rendere l’automazione economicamente conveniente per i piccoli e medi produttori e per le grandi aziende con un’elevata variabilità. L’uso dell’intelligenza artificiale nella progettazione e nella programmazione delle applicazioni robotiche è tuttavia ancora in una fase iniziale.
Intelligenza artificiale e robot: quali applicazioni pratiche – AI4Business
Attualmente, l’applicazione più consolidata per l’ottimizzazione delle prestazioni è l’ispezione robotica della qualità. L’intelligenza artificiale consente di identificare i difetti che potrebbero essere impercettibili per l’uomo in ogni fase del ciclo produttivo. In questo modo si migliora la qualità dei prodotti e si riducono al minimo gli scarti, poiché i pezzi difettosi possono essere eliminati dalla linea prima di essere lavorati ulteriormente. I settori della produzione e della logistica sono in testa all’utilizzo dell’AI nelle applicazioni robotiche.
Robot e intelligenza artificiale guida ai cambiamenti che ci attendono
Tuttavia, si registrano rapidi sviluppi nell’uso dell’AI nei robot per l’assistenza sanitaria e per i servizi professionali. La sicurezza nelle applicazioni robotiche che utilizzano l’AI è attualmente garantita da algoritmi deterministici codificati che hanno sempre la priorità, assicurando che il robot si fermi quando incontra un ostacolo. Questa situazione potrebbe cambiare con la diffusione dell’AI nella robotica e i ricercatori stanno studiando come consentire l’uso di AI “affidabile” nei componenti critici per la sicurezza delle applicazioni robotiche.
Figure AI: chi è e cosa fa la startup attiva nella robotica e AI
Startup californiana che lavora alla creazione di robot umanoidi avanzati. Ha ricevuto un finanziamento da 675 milioni di dollari; tra gli investitori Nvidia e Jeff Bezos, quest’ultimo con un investimento di 100 milioni di dollari. Ha un team composto da ex dipendenti di aziende all’avanguardia come Tesla e Boston Dynamics. La valutazione pre-money di Figure AI era di 2 miliardi di dollari.

Il punto di forza di Figure AI è il robot umanoide chiamato Figure 01. La particolarità di questo robot risiede nel modello linguistico di OpenAI, che ne alimenta le capacità di visione e linguaggio.
Lo sviluppo di modelli multimodali VLAM
Un passo fondamentale verso l’applicazione dell’AI ai robot è stato lo sviluppo di modelli “multimodali” – modelli di AI addestrati su diversi tipi di dati. Ad esempio, mentre un modello linguistico viene addestrato utilizzando una grande quantità di testo, i “modelli linguistico-visivi” vengono addestrati anche utilizzando combinazioni di immagini (fisse o in movimento) in concerto con le corrispondenti descrizioni testuali. Questi modelli imparano la relazione tra i due elementi, consentendo loro di rispondere a domande su ciò che sta accadendo in una foto o in un video, o di generare nuove immagini in base a richieste di testo.
I nuovi modelli utilizzati nella robotica fanno un ulteriore passo avanti. Questi “modelli di visione-linguaggio-azione” (VLAM) recepiscono testi e immagini, oltre ai dati relativi alla presenza del robot nel mondo fisico, tra cui le letture dei sensori interni, il grado di rotazione delle diverse articolazioni e le posizioni degli attuatori (come le pinze o le dita delle mani di un robot). I modelli risultanti possono quindi rispondere a domande su una scena, come “riesci a vedere una mela?”. Ma possono anche prevedere il modo in cui il braccio di un robot deve muoversi per raccogliere quella mela, e come questo influenzerà l’aspetto del mondo.
In altre parole, un vlam può fungere da “cervello” per robot con ogni tipo di corpo, sia che si tratti di giganteschi bracci fissi in fabbriche o magazzini, sia di robot mobili con gambe o ruote. E a differenza degli LLM, che manipolano solo il testo, i vlam devono mettere insieme diverse rappresentazioni indipendenti del mondo, in testi, immagini e letture di sensori. Questo modo di fondare la percezione del modello sul mondo reale riduce notevolmente le “allucinazioni” (la tendenza dei modelli AI a inventare e sbagliare le cose).
RFM-1 di Covariant
L’azienda Covariant ha creato un modello chiamato rfm-1, addestrato utilizzando testi, immagini e dati di oltre 30 tipi di robot. Il suo software viene utilizzato principalmente insieme ai robot “pick and place” nei magazzini e nei centri di distribuzione situati in aree suburbane dove il terreno è economico, ma la manodopera è scarsa. Covariant non produce l’hardware in sé, ma il suo software viene utilizzato per aggiornare il cervello dei robot esistenti.

Apprendimento zero-shot
L’uso di questi nuovi modelli per controllare i robot presenta diversi vantaggi rispetto agli approcci precedenti, afferma Marc Tuscher, cofondatore di Sereact, una startup di robotica. Uno dei vantaggi è l‘apprendimento “a colpo zero” (zero shot), che in gergo tecnico indica la capacità di fare una cosa nuova, come “raccogliere il frutto giallo”, senza essere addestrati esplicitamente a farlo. La natura multimodale dei modelli vlam garantisce ai robot un livello di senso comune e di conoscenza del mondo senza precedenti, come ad esempio il fatto che le banane sono gialle e sono un tipo di frutta.

Apprendimento nel contesto
Un altro vantaggio è l’“apprendimento nel contesto”, ovvero la possibilità di modificare il comportamento di un robot utilizzando suggerimenti testuali, piuttosto che una riprogrammazione elaborata. Tuscher fa l’esempio di un robot di magazzino programmato per smistare i pacchi, che si confondeva quando le scatole aperte venivano erroneamente inserite nel sistema. Per fargliele ignorare sarebbe stato necessario riqualificare il modello. “Oggi gli diamo un suggerimento – ignorare le scatole aperte – e lui sceglie solo quelle chiuse”, dice Tuscher. “Possiamo cambiare il comportamento del nostro robot dandogli un suggerimento, il che è pazzesco”. In effetti, i robot possono essere programmati da supervisori umani non specializzati utilizzando un linguaggio ordinario, piuttosto che un codice informatico.
Questi modelli possono anche rispondere in modo gentile. “Quando il robot commette un errore, è possibile interrogarlo e lui risponde in forma di testo”, spiega Chen. Questo è utile per il debug, perché è possibile fornire nuove istruzioni modificando il prompt del robot, dice Tuscher. “Si può dire al robot: ‘questo non va bene, per favore fallo in modo diverso in futuro'”. Ancora una volta, questo rende i robot più facili da usare per i non specialisti.
L’applicazione nelle auto a guida autonoma
La possibilità di chiedere a un robot cosa sta facendo e perché è particolarmente utile nel campo delle auto a guida autonoma, che sono in realtà solo un’altra forma di robot. Wayve, una startup di veicoli autonomi con sede a Londra, ha creato un vlam chiamato Lingo-2. Oltre a controllare l’auto, il vlam è anche in grado di controllare il veicolo. Oltre a controllare l’auto, il modello è in grado di comprendere i comandi testuali e di spiegare le motivazioni alla base delle sue decisioni.
Ad esempio, è possibile chiedere al modello qual è il limite di velocità e quali spunti ambientali (come cartelli e segnaletica stradale) ha utilizzato per arrivare alla risposta. “Possiamo verificare che tipo di contesto è in grado di comprendere e di vedere”, spiega.
Come per altre forme di AI, l’accesso a grandi quantità di dati di addestramento è fondamentale. Covariant, che è stata fondata nel 2017, ha raccolto per molti anni i dati delle sue implementazioni esistenti, che ha utilizzato per addestrare l’rfm-1. I robot possono anche essere guidati manualmente per eseguire un particolare compito alcune volte, con il modello che poi generalizza dai dati risultanti, un processo noto come “apprendimento per imitazione”.
Il progetto Mobile aloha
Ma questa non è l’unica opzione. Un progetto di ricerca dell’Università di Stanford, chiamato Mobile aloha, ha generato dati per insegnare a un robot le attività domestiche di base, come fare il caffè, utilizzando un processo noto come teleoperazione del corpo intero – in breve, una marionetta. I ricercatori si sono posizionati dietro il robot e hanno mosso direttamente i suoi arti, consentendogli di percepire, apprendere e quindi replicare una particolare serie di azioni. Questo approccio, sostengono, “consente alle persone di insegnare ai robot abilità arbitrarie”.
Chelsea Finn, una professoressa di Stanford che ha supervisionato il progetto Mobile aloha, è anche una delle co-fondatrici di Physical Intelligence, una startup che ha recentemente raccolto 70 milioni di dollari da finanziatori tra cui Openai. Skild, una startup di robotica nata dalla Carnegie Mellon University, avrebbe raccolto 300 milioni di dollari in aprile. Figure, che si concentra sui robot umanoidi, ha raccolto 675 milioni di dollari a febbraio; Wayve ha raccolto 1,05 miliardi di dollari a maggio, il più grande round di finanziamento di sempre per una startup europea di AI.
Kendall di Wayve sostiene che il crescente interesse per i robot riflette l’ascesa dell'”AI incarnata”, in quanto i progressi del software di AI vengono applicati a hardware che interagiscono con il mondo reale. “L’AI è molto di più dei chatbot”, afferma. “Tra un paio di decenni, la gente penserà a questo quando penserà all’AI: macchine fisiche nel nostro mondo”.
I ricercatori affermano che, con il miglioramento del software per la robotica, l’hardware sta diventando il fattore limitante, in particolare quando si tratta di robot umanoidi (vedi articolo successivo). Ma quando si tratta di cervelli robotici, conclude
Geminoidi, cosa sono, perché destano tanto interesse
I geminoidi sono una particolare categoria di robot umanoidi creati a immagine e somiglianza di un determinato essere umano. La loro invenzione si deve al giapponese Hiroshi Ishiguro negli anni Novanta. Il primo modello realizzato da Ishiguro si chiamava Geminoid H1 ed era praticamente un suo clone. Idealmente simili ai “replicanti” del romanzo di Philip K. Dick e del film “Blade Runner” poi, i geminoidi sono in grado di muoversi (ma senza camminare) e parlare, interagendo con interlocutori umani. Dopo H1, Ishiguro ha realizzato Repliee1, con le sembianze di una donna adulta e Repliee2, in tutto simile a una bambina di 4 anni, sua figlia. I geminoidi come Repliee Q2 fanno parte della categoria degli actroid, androidi con fattezze femminili in grado di svolgere funzioni di presentatrice televisiva e di attrice.

L’ultimo modello di geminoide prodotto da Ishiguro è Erica, a cui il geniale inventore giapponese ha voluto concedere anche il dono della bellezza e della grazia femminile. Si prevede che i geminoidi avranno un posto molto importante nella robotica del futuro, anche se, forse, non sarà quello immaginato dalla fantascienza.
Quali sono i vantaggi nell’uso dei robot
L’automazione dei processi industriali nasce con l’idea stessa di industria moderna, ovvero con il concetto di produzione di prodotti su scala massiva per ridurne il costo. Da questo concetto deriva l’idea di far svolgere il maggior numero di attività possibili alle macchine, che sono più veloci dell’uomo in determinati compiti. Vi sono inoltre altre ragioni che possono spingere alla sostituzione dell’uomo a favore di una macchina:
- la maggior precisione della macchina su un numero esasperatamente ripetitivo di operazioni uguali;
- l’eccessiva rischiosità del compito da svolgere per l’operatore umano;
- il minor costo dell’impiego di una macchina rispetto all’utilizzo di un uomo;
- la necessità di assoluta di non contaminare il prodotto, ovvero le produzioni che devono evitare la presenza di un essere umano.

Quest’ultimo motivo è di dominio quasi esclusivo della produzione farmaceutica e in parte di quella alimentare. Gli altri motivi sono valutati in modo complementare, per determinare se il costo rispetto all’impiego dell’operatore umano giustifichi l’investimento, che è spesso notevole, il cui ROI (ritorno di investimento) avvenga in un arco temporale accettabile. Oggi, l’evoluzione della tecnologia ha permesso di rendere automatizzabile praticamente quasi ogni operazione svolta da un operatore umano a costi accettabili quindi, con un ROI di pochi anni.

Robot: il mercato
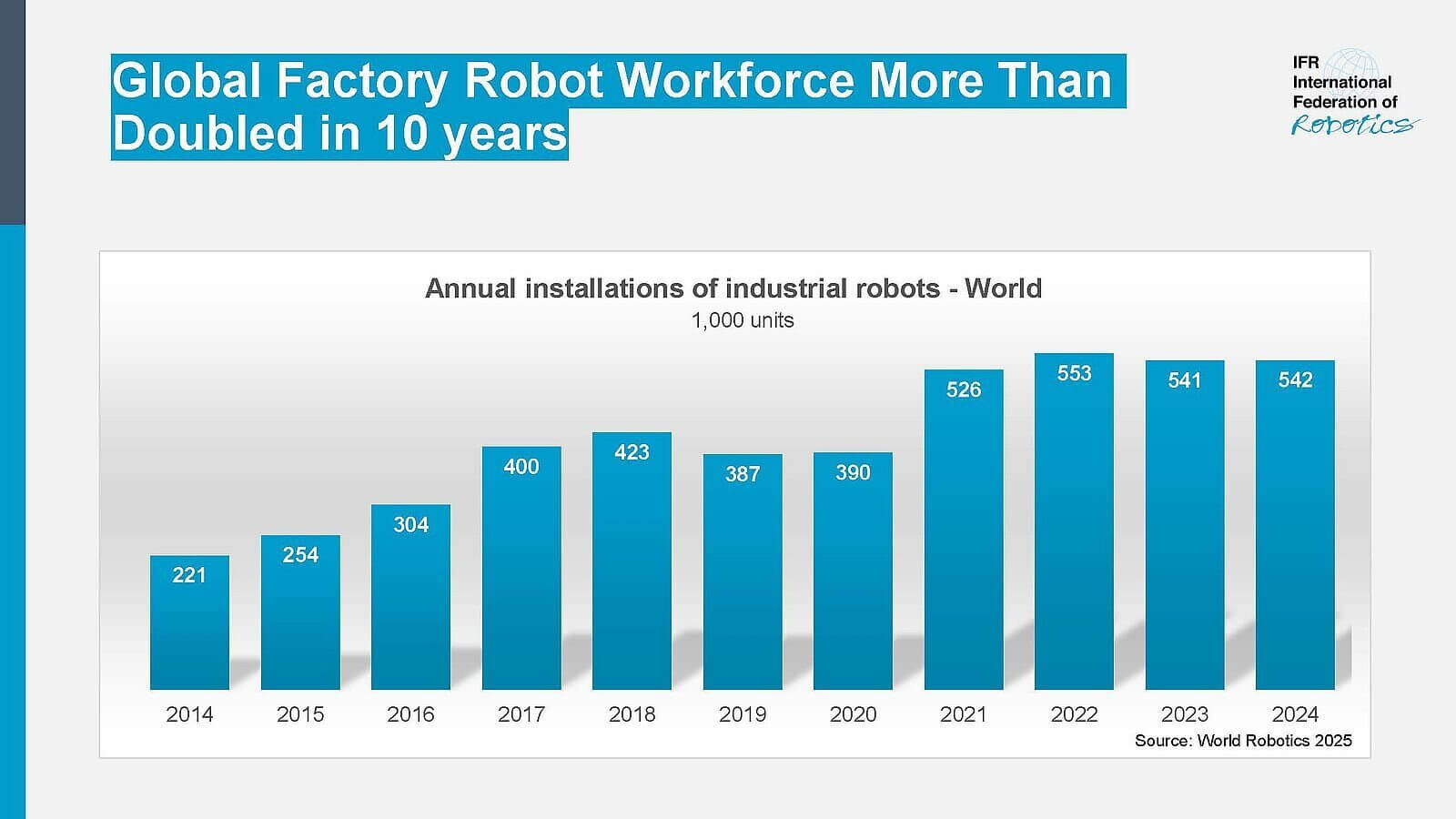
La domanda globale di robot nelle fabbriche è raddoppiata in dieci anni
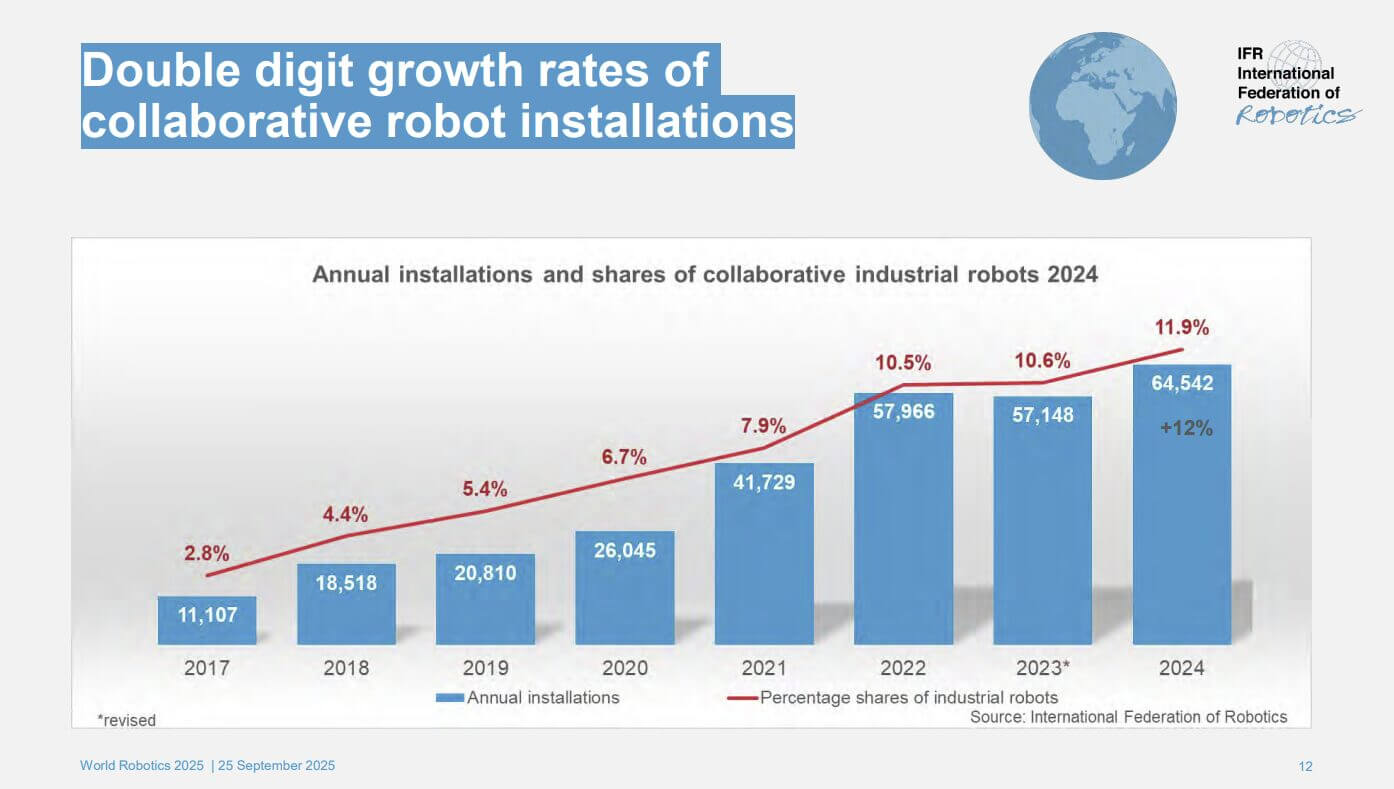
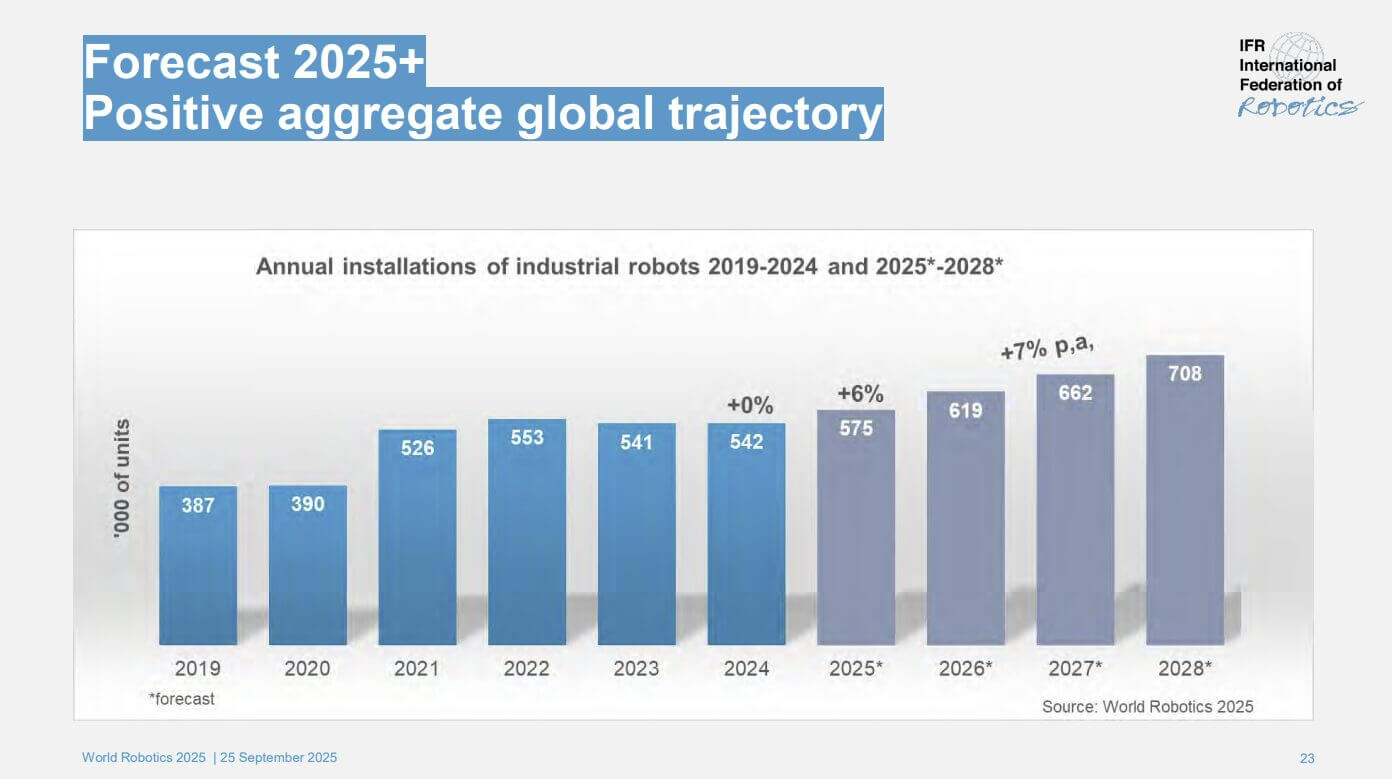
I dati del rapporto World Robotics 2025 sull’industria dei robot mostrano che nel 2024 sono stati installati 542.000 robot industriali, più del doppio rispetto a dieci anni fa. Per il quarto anno consecutivo le installazioni annuali hanno superato le 500mila unità.

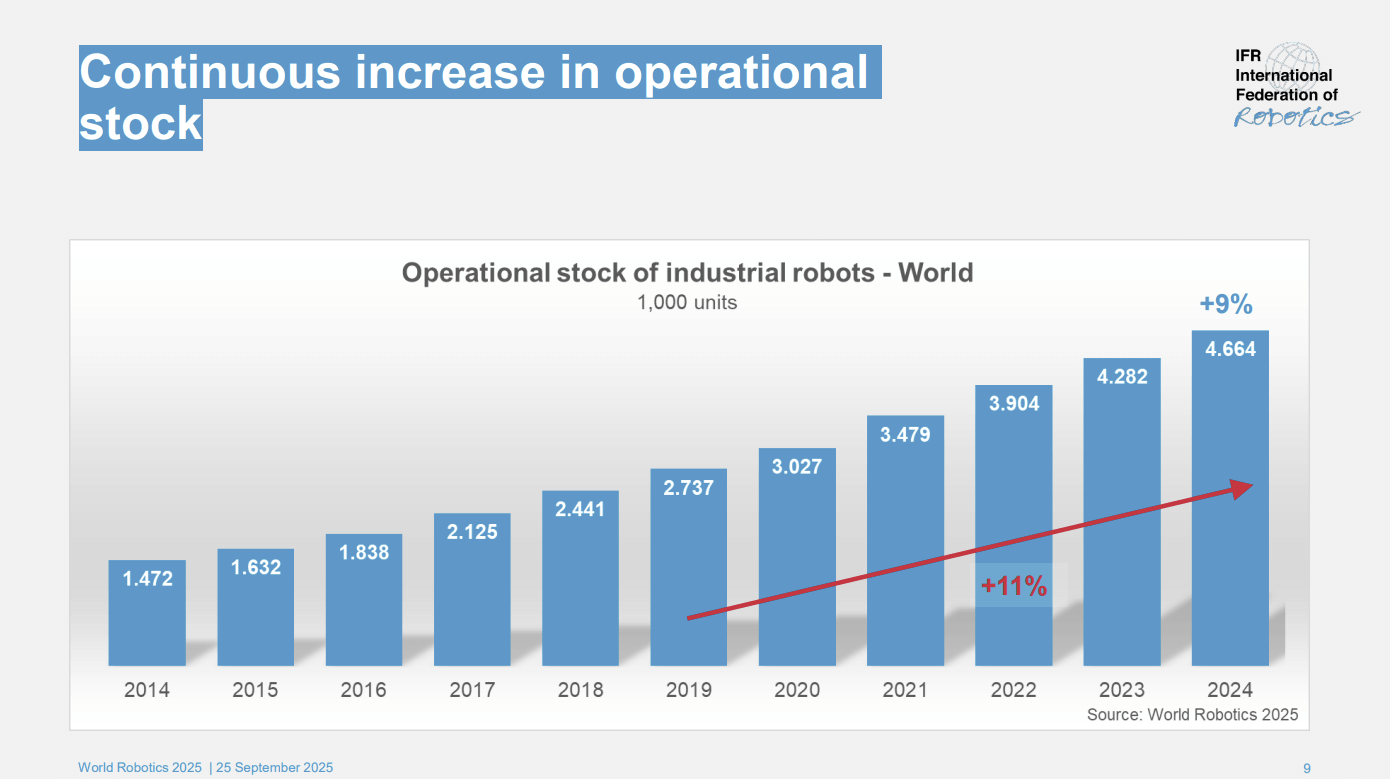
L’Asia ha rappresentato il 74% delle nuove installazioni, contro il 16% dell’Europa e il 9% delle Americhe. “Le nuove statistiche mostrano che il 2024 è stato l’anno con il secondo maggior numero di installazioni di robot industriali della storia – solo il 2% in meno rispetto al record assoluto di due anni fa”, ha dichiarato Takayuki Ito, presidente della International Federation of Robotics (IFR). “La transizione di molti settori verso l’era digitale e automatizzata ha generato un’enorme crescita della domanda. Il numero totale di robot industriali operativi nel mondo ha raggiunto le 4.664.000 unità nel 2024, con un aumento del 9% rispetto all’anno precedente.”
Asia, Europa e Americhe: panoramica globale
Asia: il motore della crescita
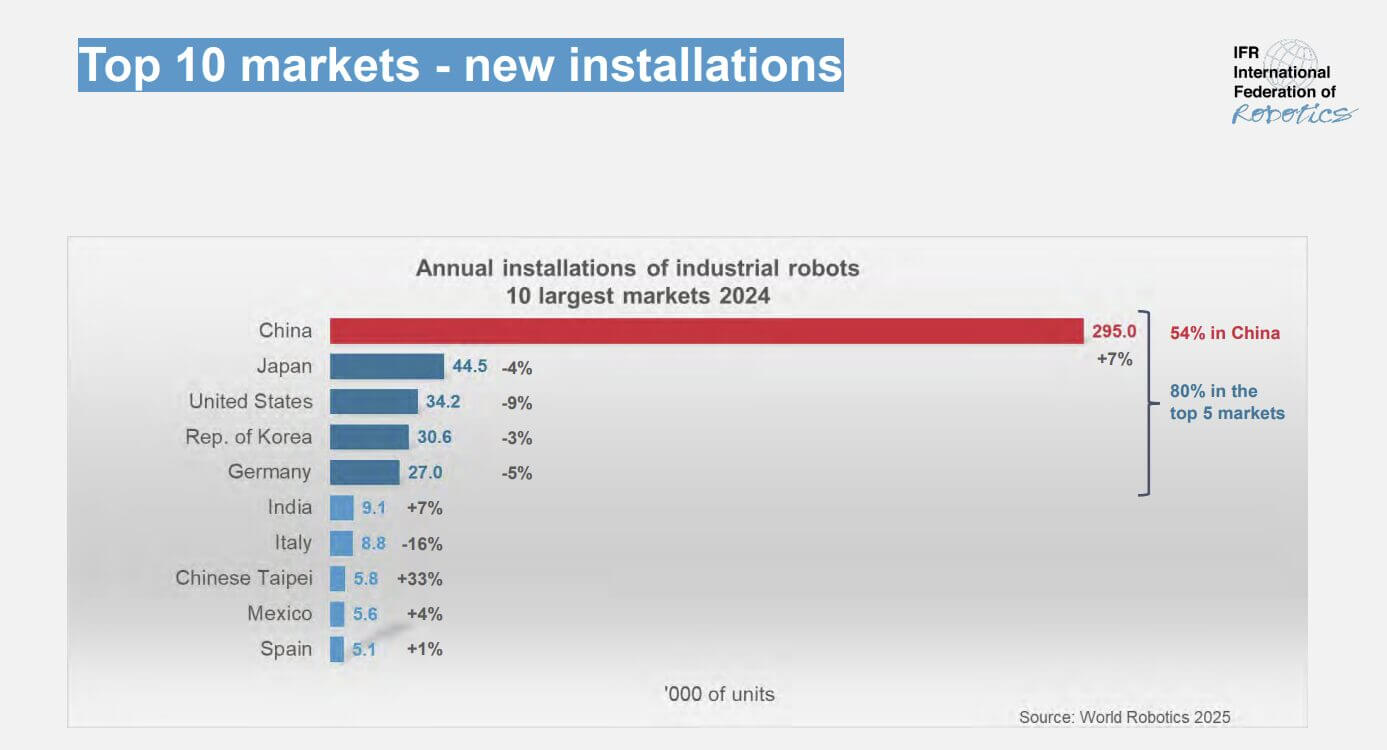
La Cina rimane di gran lunga il più grande mercato mondiale, con 295.000 robot industriali installati nel 2024, il dato annuale più alto mai registrato. Per la prima volta, i produttori cinesi hanno superato i fornitori stranieri nelle vendite sul mercato interno, raggiungendo una quota domestica del 57% (contro il 28% di dieci anni fa). Lo stock operativo di robot nel Paese ha superato i 2 milioni di unità, il più alto al mondo. Secondo le previsioni, la domanda di robot in Cina continuerà a crescere mediamente del 10% annuo fino al 2028.
Il Giappone mantiene la seconda posizione, con 44.500 unità installate (-4%). Il numero di robot in funzione è salito a 450.500 unità (+3%). La crescita prevista per il 2025 sarà modesta, ma si prevede un’accelerazione a tassi medi a una cifra negli anni successivi.
La Corea del Sud ha installato 30.600 robot (-3%) nel 2024, mantenendosi il quarto mercato mondiale dopo Stati Uniti, Giappone e Cina. Le installazioni si mantengono stabili intorno alle 31.000 unità dal 2019.
L’India continua la sua ascesa, con un record di 9.100 unità installate (+7%). Il settore automobilistico è il principale traino, con il 45% del mercato. L’India è ora il sesto mercato mondiale, subito dietro la Germania.
Europa: rallentamento ma livelli storici
Nel 2024 le installazioni di robot industriali in Europa sono diminuite dell’8%, scendendo a 85.000 unità, comunque il secondo dato più alto di sempre. L’Unione Europea ha rappresentato l’80% del totale (67.800 unità). La domanda è stata sostenuta dal fenomeno del nearshoring, con un tasso di crescita medio annuo del 3% tra il 2019 e il 2024.
La Germania resta il principale mercato europeo e il quinto al mondo: 26.982 robot installati (-5%), pari al 32% del totale europeo, il secondo miglior risultato dopo il record del 2023.
In Italia, il secondo mercato europeo, le installazioni sono calate del 16% a 8.783 unità.
La Spagna è salita al terzo posto con 5.100 unità, spinta dal settore automotive, mentre la Francia è scesa al quarto con 4.900 unità (-24%).
Nel Regno Unito, le installazioni sono crollate del 35%, a 2.500 unità. Il picco record di 3.800 unità nel 2023 è stato un’eccezione dovuta al programma fiscale “super-deduction”, terminato nel primo trimestre 2023. Nel complesso, il mercato britannico mostra un andamento ciclico e si colloca al 19° posto mondiale.
Le Americhe: crescita stabile ma in lieve calo
Le installazioni di robot industriali nelle Americhe hanno superato le 50.000 unità per il quarto anno consecutivo, attestandosi a 50.100 nel 2024 (-10% rispetto al 2023).
Negli Stati Uniti, il principale mercato regionale, le installazioni sono scese del 9% a 34.200 unità, pari al 68% del totale continentale. Gli USA importano la maggior parte dei robot da Giappone ed Europa, pur disponendo di numerosi integratori di sistemi robotici domestici.
In Messico, le installazioni hanno raggiunto 5.600 unità (-4%), con il settore automobilistico che rappresenta il 63% del mercato.
In Canada, i numeri sono scesi del 12% a 3.800 unità, con una forte dipendenza dai cicli di investimento dell’industria automobilistica (47% del totale).
Prospettive: crescita solida nonostante le incertezze
Secondo OCSE e FMI, la crescita economica globale sarà compresa tra 2,9% e 3,0% nel 2025 e tra 2,9% e 3,1% nel 2026. Tuttavia, le tensioni geopolitiche, i conflitti in Europa orientale e Medio Oriente e le interruzioni del commercio mondiale continuano a pesare sull’economia globale.
Nonostante queste sfide, l’industria della robotica mantiene una prospettiva di lungo periodo positiva. Le installazioni globali dovrebbero crescere del 6% nel 2025, raggiungendo 575.000 unità, e superare le 700.000 entro il 2028.
.