Da quando è stato creato Unimate, il primo robot industriale, la robotica ha compiuto degli sviluppi senza paragoni. Oltre a essere cresciuta l’autonomia delle “macchine”, si è ampliato notevolmente il campo di applicazione, dal settore sanitario a quello dell’agricoltura.
Indice degli argomenti:
Da Unimate a Puma
La creazione del primo robot industriale si deve a due uomini. Innanzitutto, all’inventore George Devol, che nel 1954 brevettò il “Programmed Article Transfer”. Il progetto fu ripreso dall’ingegnere Joseph Engelberger, che lo utilizzò, insieme a Devol, per la creazione dell’Unimate #001, grazie al finanziamento del CEO dell’azienda per cui lavorava Engelberger.
Il robot, dopo essere stato addestrato a svolgere mansioni dannose per il corpo umano, fu introdotto nel 1959 nella catena di assemblaggio della General Motors per permettere l’automazione del processo produttivo.
La macchina, che aveva un peso di quasi 1300 chili, dal 1961 fu prodotta in massa e venduta alle altre aziende del settore. Nel giro di un decennio, l’introduzione del modello Unimate 1900 nelle fabbriche, rivoluzionò il settore automobilistico.
Per quanto riguarda il funzionamento e lo specifico utilizzo, il robot era impiegato per la pressofusione di maniglie roventi delle porte delle automobili, facendole cadere in un liquido di raffreddamento per poter essere poi assemblate da parte degli operai. Un’operazione, questa, molto pericolosa per l’essere umano, sia per i potenziali danni fisici, sia per i fumi tossici.
Il sistema era composto da un sistema di comando collegato al braccio elettromeccanico che eseguiva un’operazione memorizzata in una memoria a tamburo.
Il concetto stesso di robot nasce quindi come sostegno o sostituto al lavoro umano, laddove essa può determinare un pericolo per l’uomo stesso. Si tratta, quindi, di uno strumento concepito per migliorare le condizioni di lavoro, non come fattore che aumenti il fenomeno della disoccupazione, come verrà poi visto negli anni successivi.
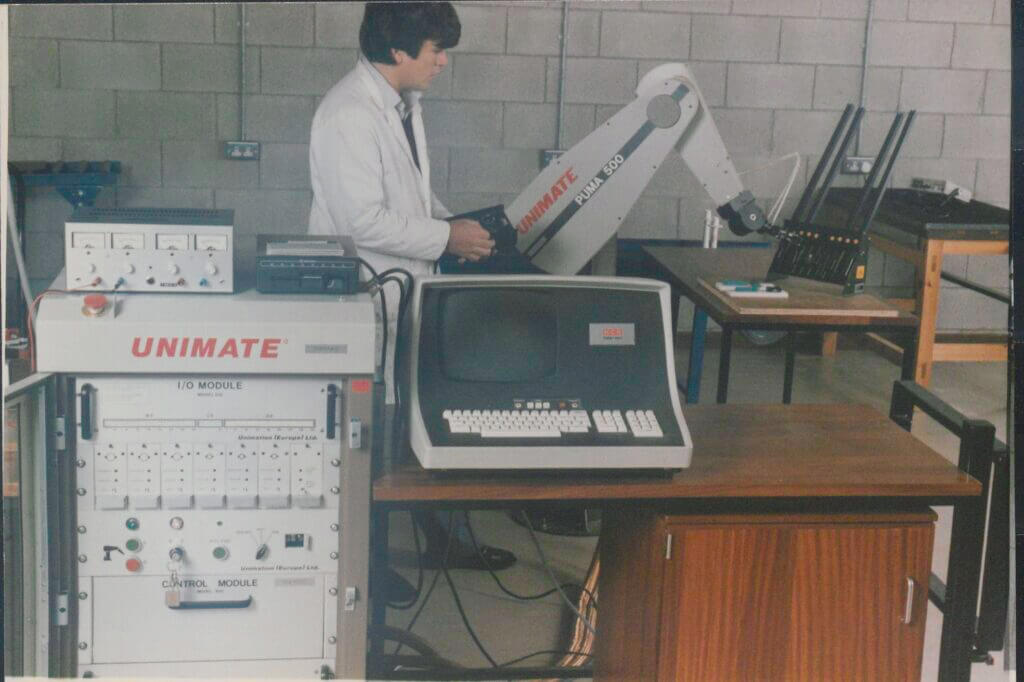
Il robot PUMA della Unimate
La Unimation, società fondata nel 1962 da Devol e Engelberger, dopo aver acquisito la Vicarm nel 1978, introdusse la Programmable Universal Machine for Assembly (PUMA), progettata da Victor Scheinman alla Stanford University.
Il robot fu sviluppato in tre diverse serie. Tutti i modelli erano composti da due componenti principali: un braccio meccanico e un sistema di controllo. Solitamente, essi erano collegati da uno o due cavi, poiché uno serviva all’input del comando e l’altro all’output del feedback.
Furono prodotte tre serie del robot: 200, 500 e 700. I modelli dell’ultima serie, i più grandi, furono utilizzati per lavori di assemblaggio, verniciatura, e saldatura.
I primi robot umanoidi
I robot di cui si è parlato finora sono di prima generazione, in quanto sono stati progettati per eseguire operazioni prestabilite dall’uomo. Diversi sia da quelli di seconda generazione, in grado di svolgere funzioni e prendere decisioni attraverso l’apprendimento automatico, sia da quelli di terza generazione, in grado di costruire nuovi algoritmi e verificarne la coerenza.
Se da un lato l’evoluzione tecnologica ha portato a sviluppare modelli sempre più complessi di robot industriali, dall’altro lato ci si è concentrati sempre di più sullo sviluppo di robot antropomorfi, in grado di uguagliare non solo le funzioni lavorative dell’uomo, ma anche quelle sociali.
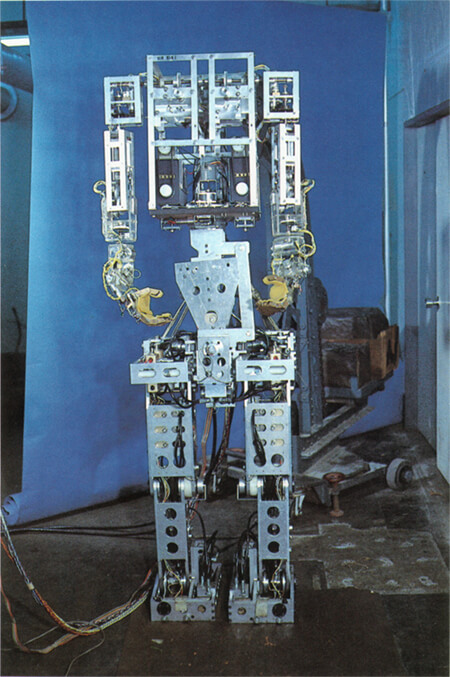
Il robot Wabot-1
Il primo robot antropomorfo su larga scala fu costruito in Giappone, tra il 1970 e il 1973. Wabot-1, costituito da un sistema di controllo degli arti, un sistema di visione e uno di comunicazione, era in grado di parlare in giapponese, di misurare le distanze e le direzioni attraverso dei recettori esterni.
L’evoluzione di questo robot, il Wabot-2, lanciato nel 1984, era in grado di suonare la tastiera, conversare con una persona ed eseguire melodie molto difficili.
Tra i più importanti, ricordiamo sicuramente il robot Asimo, introdotto nel 2000 dalla società giapponese Honda. Erede dei robot di serie E, il cui primo modello (E0) è stato lanciato nel 1986, Asimo è stato il primo dei modelli di serie P a incorporare il predicted movement control, un sistema che permette al robot di anticipare il suo prossimo movimento e spostare il suo centro di gravità, in modo da avere maggiore flessibilità. L’ultimo modello del robot, lanciato nel 2011, è in grado di correre a una velocità massima di 9 km/h, è in grado di parlare nella lingua dei segni, riconoscere i volti e le voci attraverso la combinazione di una molteplicità di sensori.
Gli ultimi sviluppi della robotica
Negli ultimi anni si sono moltiplicati gli studi nel campo della robotica e sono state implementate moltissimi sistemi in diversi settori.
Un caso particolare riguarda i modelli di automobile automatica. Questa è in grado di svolgere le normali funzioni di guida attraverso il sistema SLAM (Simultaneous Localisation and Mapping), che incrocia i dati dei molteplici sensori con una mappa off-line, trasformandoli in una mappa aggiornata.
L’azienda Tesla è sicuramente la più famosa, al giorno d’oggi, per le auto a guida automatica. Il sistema Autopilot, infatti, permette la guida autonoma, ma solo sotto la continua supervisione dell’uomo. È in fase di sviluppo, invece, il sistema per rendere le auto completamente self-driving, che non richiederebbe un intervento umano, che sarebbe “out of the loop”.

Il robot Spot di Boston Dynamics
Infine, ha suscitato molto interesse il video pubblicato dalla Boston Dynamics, azienda statunitense di ingegneria e robotica. Il video in questione mostra tre robot creati dalla società, Spot, Handle e Atlas, mentre ballano al ritmo di “Do you love me”. Per quanto non sia rivoluzionario per le capacità dimostrate, esso mostra come i robot possano acquisire un ventaglio di capacità sempre più ampio, fino a riprodurre movimenti prettamente umani e non collegati a una mansione lavorativa.
Nel caso di Atlas, ad esempio, non è stato utilizzato alcun tipo di machine learning, ma una combinazione di azioni “riflessive”, ottimizzazione della traiettoria e un modello di controllo predittivo. Inoltre, la maggior parte dei controlli erano già presenti nel momento in cui il robot è stato istruito a danzare. Il lavoro più complesso, quindi, è stato quello di simulazione e imitazione dei movimenti umani.

Il video “Do you love me?” della Boston Dynamics
Lo sviluppo di nuove tecnologie nel campo della robotica permette alle “macchine” di eseguire funzionalità sempre più variegate. Sono ormai noti gli sviluppi di robot in grado di riprodurre le emozioni umane, di cantare, apprendere autonomamente nuove funzionalità. Le ricerche future dovranno sempre tenere in conto che la robotica è una branca dell’ingegneria al servizio dell’uomo e come tale dovrà rimanere.
Le numerose applicazioni in campo militare, poi, hanno sollevato questioni etiche e morali. Non è un caso che la legislazione stia tenendo sempre più conto di ciò, si pensi alla volontà del Parlamento europeo di bandire i cosiddetti “robot killer”, espressa in un report pubblicato a gennaio 2021.