
Il mercato automobilistico è in continua evoluzione, e da sempre rappresenta uno dei principali “portavoce” dello sviluppo tecnologico. Più di recente, le compagnie del settore hanno cominciato a progettare veicoli nei quali il conducente umano sia un optional e non più una condizione essenziale: le auto a guida autonoma. Da ciò emergono inevitabili quesiti in termini di implicazioni tecnologiche e profili di responsabilità.
Indice degli argomenti:
Auto a guida autonoma, breve storia
Per trovare il momento in cui l’essere umano ha iniziato anche solo a ipotizzare delle auto che si guidassero da sole occorre risalire al 1939, quando General Motors si presentò alla Fiera Mondiale di New York con Futurama, una esposizione che illustrava le previsioni della compagnia sulle città e sui mezzi di trasporto a vent’anni da quella data. Ovviamente, oggi possiamo affermare che quell’ipotesi fu molto frettolosa, dato che negli anni ‘70 si era ben distanti dalle auto a guida autonoma. Tuttavia, una cosa che accomuna le teorie dell’epoca non è il fatto che queste fossero errate, ma semplicemente si sarebbero realizzate molti anni dopo rispetto al periodo originariamente previsto. Il cammino, infatti, è stato ed è ancora più lungo del previsto, ma oggi ci sono tecnologie molto avanzate che hanno permesso di migliorare l’esperienza di guida fino ai test dei primi veicoli a guida autonoma.
Per esempio, a oggi il chilometraggio dei test di sicurezza di tali mezzi a Pechino ha superato i 3 milioni di km, sfruttando ben 226 percorsi per il collaudo dislocati in tutta la città.
Quanto un loro uso quotidiano sia imminente, dipende dalla rapidità con la quale verranno perfezionate le nuove tecnologie ed elaborati i nuovi strumenti giuridici per regolare il fenomeno.
Lo stato dell’arte: la tecnologia ADAS
Le auto a guida autonoma – o self driving – potranno essere una realtà quotidiana tra qualche anno, l’unico dubbio che persiste riguarda però i tempi. Ma per capire come cambierà il futuro della mobilità, occorre partire dallo stato dell’arte.
Questi veicoli – come suggerisce il termine – sono dei mezzi di trasporto in grado di circolare in strada da soli senza l’intervento umano. Gli attuali modelli di auto, però, sono essenzialmente dotati di innovazioni come il controllo di crociera e il Lane Assist, che fanno parte di sistemi di supporto per il conducente – il c.d. Advanced Driver-Assistance System (ADAS) – per la limitazione degli incidenti ed il miglioramento delle prestazioni. Infatti, oggi possiamo parlare tuttalpiù di veicoli a guida assistita o ad autonomia parziale, ossia mezzi nei quali l’auto può prendere alcune decisioni autonome ma il controllo e l’ultima parola spettano ancora al conducente.
Queste tecnologie si compongono di una serie di sensori che lavorano insieme al software di bordo per monitorare la guida e intervenire in caso di emergenza. In altri termini, nel veicolo è presente un sistema centralizzato che integra la struttura base del computer di bordo e assiste il guidatore in diverse situazioni. I dispositivi ADAS si fondano tutti sugli stessi principi tecnologici, integrati da alcuni elementi ulteriori volti ad adattarli ai singoli scopi.
Uno dei sistemi più utilizzati è senz’altro l’avviso di collisione, che agisce mediante dei sensori installati sul veicolo che, in base alla distanza, alla velocità ed al traffico, si attivano in caso di avvicinamento eccessivo “avvisando” del rischio imminente e “preparando” l’auto al possibile tamponamento. Molto simile è senz’altro l’Intelligent Parking Assist System – il c.d. assistente di parcheggio – con la sola differenza che l’avvertimento avviene in fase di manovra per il posteggio e non durante la marcia su strada. Talvolta questo viene integrato da videocamere che consentono al conducente di beneficiare non solo dell’avviso sonoro che cambia a seconda della prossimità agli altri veicoli, ma anche di una panoramica visuale che altrimenti non avrebbe. Lo stesso discorso vale per gli ADAS per il monitoraggio degli angoli ciechi che permettono di scoprire eventuali pericoli “occulti” e avvisare il conducente. Ciò permette di migliorare la sicurezza di guida, per ridurre il rischio di collisioni stradali e incidenti con pedoni e ciclisti.
Questi sono solo alcuni esempi dei principali strumenti di cui sono dotate molte delle auto in circolazione, ma potremmo citarne altri come la Frenata automatica di emergenza (AEB) o il Rilevatore della stanchezza del conducente, che è uno degli ADAS più importanti e sofisticati. Quest’ultimo, mediante un sistema complesso di telecamere e sensori, monitora l’attenzione del guidatore, intervenendo in caso di bisogno con avvisi acustici; in assenza di una reazione umana, poi, vengono attivati degli ausili ulteriori come il controllo del veicolo da parte del computer di bordo.
Ebbene, tutti questi dispositivi ad alta tecnologia, oltre ai sistemi di sensori e videocamere che gli consentono di adempiere a diverse funzioni, condividono un’altra caratteristica comune: sono ancora distanti dal livello di sofisticatezza e precisione richiesti per la guida totalmente autonoma.
Gli ADAS sono infatti la base delle future self driving car, ma, come già accennato, sono ancora “dipendenti” dall’intervento del conducente.
Le basi del self driving
Come abbiamo visto, i sistemi ADAS consentono di godere già di molti ausili, ma per poter parlare di vera self driving car non basta che questa abbia strumenti capaci di ridurre l’intervento del conducente, bensì di escluderlo totalmente. Si tratta quindi di un’evoluzione successiva, ma non ancora della realtà.
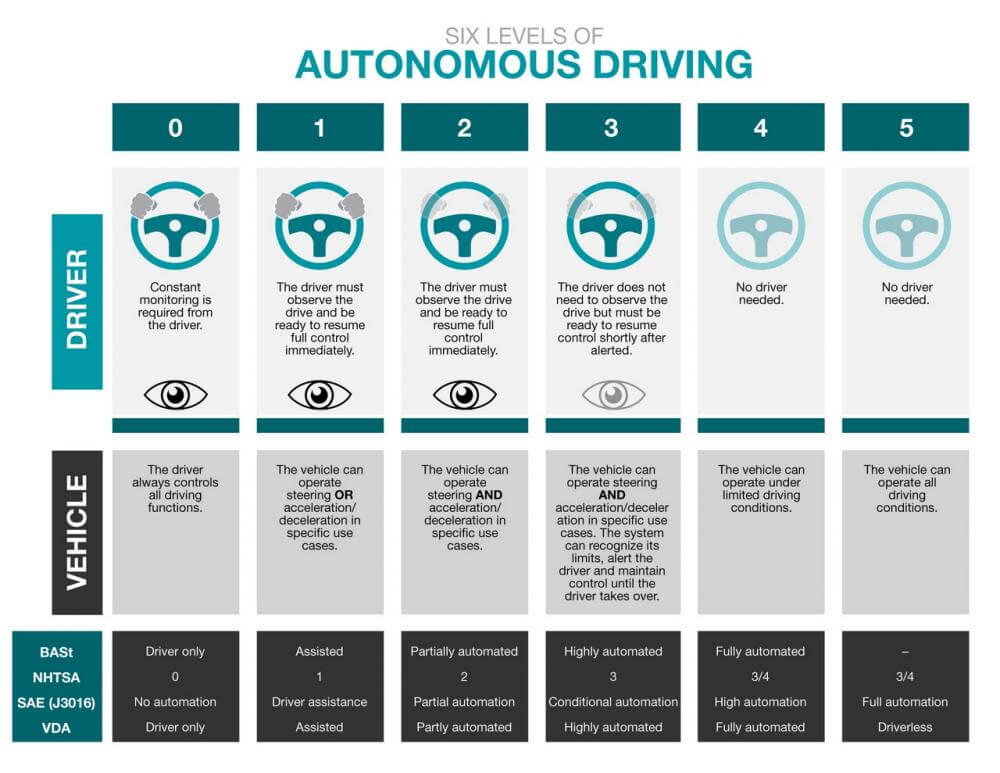
Un accenno ai diversi livelli di autonomia delle auto può comunque essere utile a capire. Esistono infatti 6 gradi di self driving, ma soltanto gli ultimi due rappresentano davvero la massima evoluzione di questa tecnologia. La gradazione consiste in una suddivisione ormai accettata a livello mondiale, realizzata per la prima volta da SAE (Society of Automotive Engineers) e utilizzata da tutti gli operatori del settore. Il livello 0 comprende ovviamente le auto prive di qualsivoglia autonomia, quelle cioè dotate di sensori e sistemi che informano il conducente su eventuali guasti o di dispositivi che forniscono una modesta assistenza al guidatore. Il grado massimo di self driving è invece il livello 5, ossia l’obiettivo finale, quello in cui il volante e i pedali non sono necessari poiché l’auto fa tutto in modo indipendente e il conducente non deve mai intervenire. In altri termini, si tratta del caso in cui ogni persona a bordo diventa un passeggero.
Ad oggi ci sono dei modelli estremamente avanzati, su tutti la Tesla Model 3 dotata del sistema Autopilot e alcune auto di livello 3 che permettono di beneficiare della guida autonoma per brevi tratti e a determinate condizioni, come ad esempio l’Audi A8. Il livello 5, però, è ancora un progetto.
L’idea della tecnologia di guida autonoma è basata essenzialmente proprio sul software di pilota automatico che, come accennato, è in parte già esistente in alcune circostanze. Questo controlla l’auto attraverso una serie di sensori ed è in grado di comunicare con le altre vetture e l’infrastruttura stradale, dialogando in tempo reale con semafori, gallerie e piattaforme web che forniscono informazioni sul traffico ed eventuali incidenti. Oltre a questo, la self driving car può condurre il veicolo automaticamente monitorando lo spazio mediante l’utilizzo di sensori a ultrasuoni, sistemi radar e localizzatori GPS, potendo quindi rilevare ostacoli come altre auto, ciclisti o pedoni.
I sistemi sensor-based intervengono poi in tutti quegli ambiti in cui l’errore umano tende a verificarsi con più frequenza, agendo sia a bassa che ad alta velocità, tanto nel traffico della città quanto in autostrada.
Per capire quindi i motivi che a oggi ostacolano ancora la circolazione dei veicoli autonomi, occorre tenere sempre presente il fatto che – sinteticamente – quello che renderebbe possibile il self driving dovrebbe basarsi sull’integrazione tra diversi sistemi connectivity – based, che si suddividono in V2V (veicolo con veicolo) e V2I (veicolo con infrastruttura). Questo è ciò che permette alla vettura di raccogliere dati dall’esterno, immagazzinarli, e applicarli istantaneamente per agire in modo sicuro senza che ci sia bisogno dell’intervento del conducente. Qui infatti emergono i limiti, poiché non solo le tecnologie necessarie ai veicoli non sono ancora pronte per andare oltre i test, ma anche le stesse città e le loro infrastrutture non sono ancora dotate di un livello di connettività tale da rendere superfluo il guidatore.
In altri termini, occorre un insieme di fattori che devono funzionare alla perfezione e in modo coordinato, senza che possa essere trascurato il minimo dettaglio. Non bisogna dimenticare che in gioco c’è la sicurezza delle persone.

Profili giuridici e di responsabilità nella guida autonoma
Le implicazioni del ricorso al self driving non si limitano naturalmente ai soli elementi tecnologici, che costituiscono il solo aspetto della fattibilità tecnica del progetto. Dall’altro lato, occorre fare i conti con un altro dato, ossia la possibilità giuridica.
Sotto questo punto di vista occorre partire dal fatto che, ad oggi, l’UE non ha ancora dato il via libera a queste tecnologie, sebbene alcuni costruttori – come la già citata Tesla – sarebbero già in grado di proporre veicoli a guida autonoma di livello 3 e 4. Sulla stessa scia anche l’Italia, che non consente alle self driving car di livello superiore al 2 di circolare. Questo fa sì che ogni considerazione giuridica debba essere fatta sulla base di norme che non sono al passo con l’evoluzione tecnologica in atto, a partire dal tema cardine, ossia la responsabilità in caso di infrazioni o sinistri che coinvolgono le auto a guida autonoma.
Nella normativa italiana, uno dei primi spunti di riflessione è dato dall’art. 46 CdS, il quale stabilisce che “si intendono per veicoli tutte le macchine di qualsiasi specie, che circolano sulle strade guidate dall’uomo”.
Poiché però le auto del futuro non prevedrebbero la guida umana, una prima interpretazione potrebbe portare a un trasferimento in capo al conducente di una eventuale responsabilità basata sul dovere di supervisionare l’integrità del veicolo e di intervenire in caso di criticità o di pericolo. Questo però richiederebbe un congruo preavviso affinché la persona possa effettivamente adempiere e, soprattutto, dimostrare di averlo fatto correttamente in modo da escludere la propria responsabilità in caso di danno. In altri termini, si tratterebbe di una sorta di applicazione analogica dell’art. 2051 c.c. sui danni cagionati da cose in custodia: il soggetto non sarebbe più responsabile in quanto conducente del veicolo, bensì come custode dello stesso, potendo scagionarsi solo provando il caso fortuito. Tuttavia, difficoltà in tal senso emergono con l’art. 115 CdS, che stabilisce i requisiti anagrafici e fisici del guidatore.
Una via percorribile potrebbe essere allora quella intrapresa dalla Germania, in cui al guidatore si deve dare la possibilità di disinserire in ogni momento il sistema e riacquisire il controllo, e metterlo nelle condizioni di monitorare il funzionamento del veicolo e le condizioni del traffico. In questo caso, l’intervento umano sarebbe tale da giustificarne un’eventuale responsabilità, ma il discorso rimane molto complesso.
Infatti, a oggi i possibili destinatari degli eventuali obblighi risarcitori derivanti dalla circolazione delle self driving car potrebbero, ipoteticamente, essere soltanto quattro:
- il guidatore
- il proprietario
- un soggetto esterno come, ad esempio, un fondo di supporto pubblico
- il costruttore.
Nel sistema odierno è il conducente del veicolo a essere considerato primariamente responsabile per le azioni compiute alla guida. Il centro del dibattito è proprio il concetto di “azioni compiute”: come si può attribuire una responsabilità per le condotte tenute, quando le auto a guida autonoma si basano proprio sull’assenza dell’intervento umano?
Inoltre, l’attuale sistema prevede anche la possibilità di considerare ex ante i doveri del conducente per valutare ciò che avrebbe dovuto fare per evitare il danno. Anche in questo caso, però, occorre chiedersi se sia ragionevole puntare il dito verso il guidatore. Inoltre, per ricollegarci all’ipotesi di responsabilità per l’omesso monitoraggio del funzionamento del veicolo, il livello di tecnologia utilizzato nelle future auto sarà alla portata di tutti, oppure per certi tipi di valutazioni sarà indispensabile l’intervento di persone con determinate competenze? Possiamo trarre degli spunti dai giorni nostri, dove i guidatori possono essere messi di fronte tanto a problematiche evidenti e banali come una gomma bucata, quanto a malfunzionamenti rilevabili soltanto da personale specializzato.
Vediamo quindi che l’attuale sistema di responsabilità civile farebbe ricadere il costo degli incidenti su un soggetto che potrebbe non essere in grado di ridurre la probabilità del verificarsi dell’evento e non essere in possesso delle competenze adeguate a operare un miglioramento delle prestazioni del veicolo.
Conclusioni
Negli ultimi anni abbiamo visto le nuove tecnologie rendere possibili cose apparentemente impossibili, e ispirare progetti fino a poco tempo fa impensabili. Da Sophia, il primo robot al mondo capace di sviluppare un senso di maternità al recente progetto del Metaverso annunciato da Facebook, stiamo vivendo un periodo d’oro per il settore. Certamente le auto a guida autonoma potranno inserirsi in questo percorso evolutivo, e in tal senso occorrerà monitorare i prossimi sviluppi per capire se le previsioni Elon Musk di arrivare al livello 5 entro il 2022 si concretizzeranno. Tuttavia, seppure questo tipo di veicoli sarà probabilmente il futuro, occorre come sempre farsi trovare pronti fin da subito e sotto tutti i punti di vista.
Per quanto riguarda il profilo delle implicazioni tecnologiche, pensiamo a quanto talvolta sia complesso far funzionare in modo ottimale un’auto tradizionale, figuriamoci quindi quanto potrebbe essere complicato renderle idonee a percorrere le strade in sicurezza e senza guidatore. Sarà necessario evitare di bruciare i tempi per le logiche del mercato, e mettere al primo posto la sicurezza delle persone. Appena pochi mesi fa, in Texas, due persone sono morte in un incidente stradale perché la Tesla sulla quale viaggiavano a grande velocità si è schiantata contro un albero; secondo le testimonianze delle autorità, nessuno dei due presenti sul veicolo era al posto di guida. Si tratta solo di un ennesimo caso, dopo quelli che hanno visto l’investimento di pedoni o veicoli che passano col rosso senza il minimo accenno di frenata. Questi eventi sono costati alla casa automobilistica l’accusa di utilizzare i suoi clienti come cavie per la sperimentazione delle self driving car da parte di diversi attivisti a tutela dei consumatori. Tuttavia, rappresentano soprattutto la prova che seppure la tecnologia possa portare ad abbattere ogni barriera, necessita comunque di tutto il tempo che serve per far sì che sul percorso nessuno paghi le conseguenze della fretta di arrivare prima dei competitor.
Oltre agli aspetti tecnici, però, occorre anche che i legislatori inizino a pensare a un corpus normativo appositamente pensato per regolare la circolazione delle auto a guida autonoma, i requisiti delle stesse per l’accesso al mercato e i profili di responsabilità in caso di danni, con la possibilità di escludere la stessa qualora il guidatore ponga in essere condotte che possano essere ragionevolmente pretese da un soggetto che non sia necessariamente un ingegnere specializzato. Un coinvolgimento delle case costruttrici nei procedimenti di accertamento delle colpe e delle mancanze sarebbe peraltro un ottimo strumento per incentivare la massima cura dei prodotti.
Alcuni Paesi come il Regno Unito, il Giappone e gli Stati Uniti si stanno facendo avanti come capifila nella disciplina del settore, cosa che dovrà fare presto anche l’Europa (con il fortunato e utile strumento giuridico del Regolamento), perché limitarsi a vietare la circolazione delle auto che superino un certo livello di autonomia non è sufficiente e l’esperienza insegna che l’unico modo per correre più veloci della tecnologia è giocare d’anticipo.

