Victor Scheinman è considerato uno dei più importanti inventori nel campo della robotica. Ha contribuito in modo fondamentale all’automazione della produzione in serie, attraverso la creazione dei più famosi robot industriali.
Indice degli argomenti:
Storia di Victor Scheinman
Victor Davide Scheinman nacque nel 1942 ad Augusta, in Georgia, dove il padre lavorava nell’Esercito degli Stati Uniti. Alla fine della guerra, la famiglia si trasferì a Brooklyn, dove la madre iniziò a insegnare in una scuola ebraica e il padre tornò a lavorare come professore di psichiatria.
Mentre era al liceo, Scheinman costruì una macchina da scrivere a controllo vocale per la Fiera della scienza. Questo gli valse l’accesso a un corso per undergraduates al Massachusetts Institute of Technology (MIT), quando aveva solo sedici anni. Nel 1963 si laureò in ingegneria aeronautica e astronautica e ottenne un lavoro alla Boeing, dove lavorò alla progettazione di un simulatore di gravità lunare.
Successivamente, si iscrisse alla Stanford University, prima nel dipartimento di Aeronautica e Astronautica e poi in quello di ingegneria meccanica. Dopo aver completato il master in un solo anno, collaborò col team che lavorava al Programma Apollo, progetto della NASA che portò allo sbarco dei primi uomini sulla Luna. In particolare, Scheinman lavorò sullo scudo termico del modulo di comando e sulle turbopompe del razzo Saturn.
Durante il suo periodo di studio alla Stanford University, Scheinman progettò il cosiddetto Stanford Arm, considerato il primo robot moderno. Successivamente, progettò il MIT arm e il robot PUMA, sviluppato poi dalla Unimation.
Nel 1973 fondò la Vicarm Inc. per la produzione dei suoi robot. Assunse Brian Carlisle e Bruce Shimano che, in seguito, lo aiutarono nella fondazione della Adept Robotics.
Nel 1980 iniziò a lavorare per la Automatix, per la quale sviluppò RobotWorld, un sistema di automazione basato sul concetto che i robot dovrebbero lavorare nei propri ambienti autonomi, in modo tale che non possano generarsi contrasti con il lavoro svolto dagli esseri umani.
Negli anni ’90, l’azienda fu ceduta alla Yaskawa Electric Corporation, per la quale l’ingegnere statunitense lavorò per molti anni.
Per il suo grande contributo nel campo della robotica, Scheinman ottenne dei prestigiosi riconoscimenti, quali il Joseph F. Engelberger Robotics Award, nel 1986, e il Leonardo Da Vinci Award, conferitogli dall’American Society of Mechanical Engineers nel 1990.
Victor Scheinman morì nel 2016 a Petrolia, in California. Suo figlio, Dave Scheinman, è presidente della SummerBio, società americana che ha sviluppato un tampone molecolare per la rilevazione del Covid-19.
Primi approcci alla robotica
Scheinman mostrò fin da giovane grandi capacità nel campo della robotica. Come detto in precedenza, quando era adolescente costruì una macchina da scrivere a controllo vocale che gli valse l’accesso al MIT.
Successivamente, lavorò come assistente di ricerca allo Stanford Artificial Intelligence Laboratory, che possedeva una protesi elettrica di un braccio, il Rancho Arm, sviluppato dal Rancho Los Amigos Hospital. La protesi era stata progettata per essere manovrata attraverso la lingua dell’utilizzatore. Scheinman fu incaricato di mantenere in funzione il macchinario, ma esso era di difficile utilizzo, a causa della scarsa accuratezza e di un complesso processo di cinematica inversa che lo controllava.

Rancho Arm
In seguito, Scheinman si dedicò allo sviluppo dell’Orm arm insieme a Larry Leifer. Il braccio era costituito da sette piatti sovrapposti, ognuno dei quali connesso alle successive da quattro attuatori pneumatici. Ognuno di essi, poi, poteva essere gonfiato o sgonfiato impostando o reimpostando un bit in una parola del computer. Tuttavia, anche questo braccio risultò molto difficile da utilizzare.
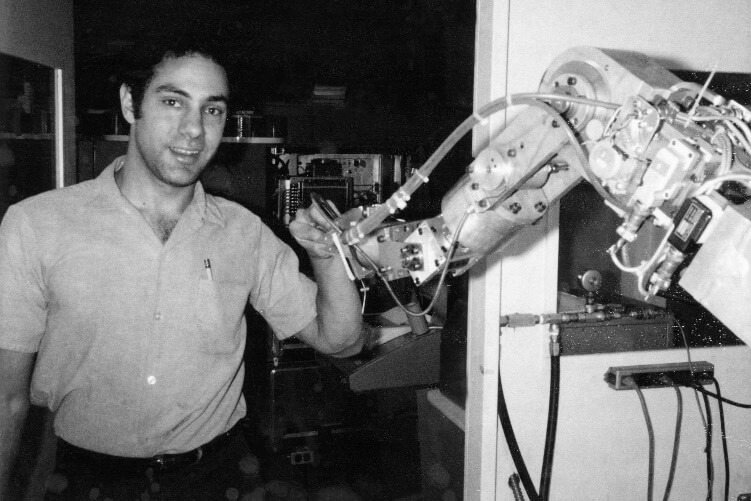
Infine, Scheinman arrivò alla creazione dello Stanford Hydraulic Arm, braccio molto veloce che richiedeva l’utilizzo di tutta l’energia del computer PDP-6.
Lo Stanford Arm
Nel 1969, Scheinman sviluppò una delle sue più grandi invenzioni: lo Stanford Arm. Si trattava di un braccio su sei assi completamente elettrico; fu il primo esempio di robot in senso moderno, in quanto comandato da attuatori elettrici e in grado di muoversi con grande precisione.
Dopo aver realizzato la sua tesi su tale progetto, iniziò a lavorare per la RacChem. Dopo circa un anno, fu richiamato dalla Stanford University per proseguire lo sviluppo del robot da lui inventato. Portò a compimento lo sviluppo del primo braccio (Gold arm) e poi del secondo (Blue arm).

Stanford Arm
Nel 1972 Marvin Minsky, informatico ed esperto di intelligenza artificiale, lo volle al MIT per sviluppare un robot maggiormente compatto. Scheinman ottenne un finanziamento dalla Defense Advanced Research Projects Agency (DARPA) per creare un robot chirurgico. Il nuovo robot prese il nome di MIT arm. Anche questo, come lo Stanford arm era dotato di assi che si intersecano, ma essi avevano una forma rotoidale e non prismatica.

MIT arm
Entrambi i robot ebbero un grande successo, visto che ben presto la Vicarm, società fondata da Scheinman, ricevette richieste di acquisto da molte università, dalla General Motors e dal National Bureau of Standards.
PUMA
Mentre studiava alla Stanford University, Scheinman ottenne una borsa di studio finanziata da George Devol, creatore di Unimate, primo robot industriale.
Scheinman fu invitato a visitare la Unimation insieme a Devol e Joseph Engelberger. Qui potè osservare il funzionamento di robot elettroidraulici, programmati per ripetere un ciclo di azioni attraverso l’esecuzione di una serie di processi intermedi. Tuttavia, questi non erano in grado di seguire un processo continuo che portasse da A a B.
Scheinman portò alla Unimation un modello di controller progettato per controllare interamente il processo del robot. Engelberger ne capì le potenzialità e il modello fu esposto in diverse mostre. La General Motors commissionò a Scheinman la creazione di una versione più grande del robot, ma l’inventore aveva bisogno di una società più grande. Fu così che nel 1977 Scheinman vendette il suo progetto alla Unimation, che lo sviluppò insieme alla General Motors, dando vita alla Programmable Universal Machine for Assembly (PUMA).
Per molti anni, diversi modelli di PUMA furono utilizzati nelle fabbriche per l’automazione di lavori ripetitivi e pericolosi per l’uomo. I modelli della serie “200” erano piccole unità da tavolo. Uno di questi robot fu utilizzato, nel 1985, per eseguire la prima biopsia stereotassica robotica al cervello.
La serie “500” è quella più famosa e le unità potevano raggiungere anche i due metri. Infine, i modelli di categoria “700”, i più grandi di tutti, venivano utilizzati nella catena di montaggio, per la pittura e per i lavori di saldatura.

Video: Unimate Puma 560
Tutti i modelli erano costituiti da due componenti: un braccio meccanico e un sistema di controllo. Questi due erano connessi attraverso uno o due cavi multi-conduttori. Un cavo serviva per portare energia ai servomotori e ai freni e l’altro per portare un feedback della posizione di ciascun giunto al sistema di controllo.
Da notare come, grazie alle sue caratteristiche innovative, il robot PUMA fu prodotto in serie anche dalla Nokia, prima che l’azienda arrivasse alla creazione di propri modelli.
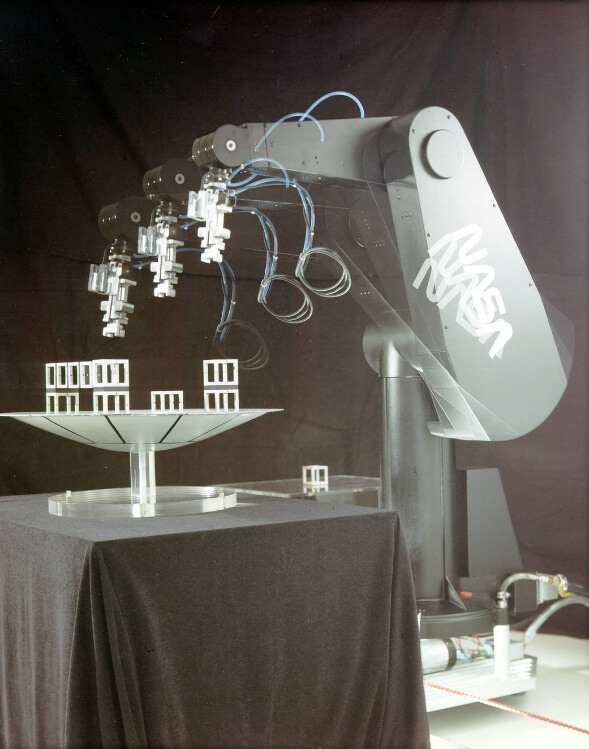
Un modello del robot PUMA utilizzato dalla NASA
Nel 2002, la Controls, Robotics and Welding della General Motors donò il prototipo originale del robot PUMA al National Museum of American History dello Smithsonian Institution.

Video: il robot PUMA impiegato nel disegno tecnico con software CAD
Altri articoli della serie “Inventori dell’AI”
Alan Turing: il padre dell’informatica
George Devol, il nonno della robotica
Isaac Asimov, scienziato e scrittore
Joseph Engelberger – Il padre della robotica
Ben Skora, l’autodidatta della robotica
Reymond Clavel – Il genio dei robot paralleli
Hiroshi Ishiguro, il creatore dei robot geminoidi