Indice degli argomenti:
Chi è Reymond Clavel
Ingegnere meccanico e professore di robotica, Reymond Clavel è considerato un pioniere nel campo dei robot paralleli.
Biografia
Reymond Clavel nasce nel 1950 a Friburgo, in Svizzera. Nel 1973 si laurea in ingegneria meccanica presso il Federal Institute of Technology of Lausanne (EPFL). Dopo aver lavorato per nove anni nel reparto Ricerca e Sviluppo della Hermes Precisa International, viene assunto come professore presso l’EPFL nel 1981, dove consegue il PhD in robotica parallela nel 1991.
Nel 1985 Clavel inventa il Delta Robot, che ha rivoluzionato l’industria dell’imballaggio. Questa invenzione gli vale numerosi premi, tra cui il JIRI Award, il Golden Robot Award e il Grand Prix de l’Innovation.
Successivamente, Clavel ricopre alcuni ruoli chiave all’interno dell’EPFL. Dapprima come capo di dipartimento, poi come direttore dell’area di microingegneria e, dal 1993 al 2013, come direttore del Laboratory of robotics systems (LSRO).
Attualmente si occupa di robotica parallela, robotica ad alta velocità e alta precisione e di applicazioni di robotica nel campo della medicina e della chirurgia.
Il robot Delta
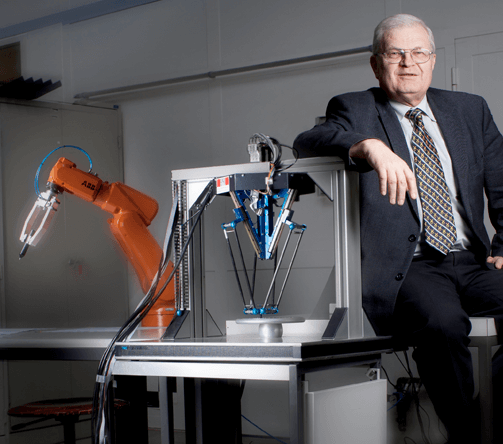
L’invenzione più importante di Clavel è sicuramente il robot Delta. Esso è costituito da tre bracci collegati da giunti universali alla base. L’elemento fondamentale è l’utilizzo del parallelogramma nei bracci, in modo tale che questi mantengano l’orientamento del dispositivo di estremità.
Questo robot è utilizzato principalmente per l’imballaggio, in quanto consente di eseguire molte operazioni in poco tempo. Clavel era a capo del team dell’EPFL che sviluppò il primo esemplare di questa macchina, il cui scopo era quello di manipolare oggetti piccoli e leggeri molto velocemente.
In un’intervista, Clavel riferì che l’idea del robot nacque da una fabbrica di cioccolato. Uno dei suoi assistenti, infatti, dopo averla visitata propose al team di sviluppare una macchina per l’imballaggio automatico dei cioccolatini. La prima idea, spiega Clavel, fu di utilizzare motori idraulici, poiché più potenti. Ma presto cambiarono approccio, dato il peso insignificante dei cioccolatini. L’idea fu di costruire un robot a tre braccia ultraleggere e inserire le parti pesanti del motore nella base. Per quanto l’idea sembrasse rivoluzionaria, la richiesta di brevetto fu respinta, in quanto esisteva un progetto del 1938 che era molto simile, il robot Pollard, che però non consentiva la traslazione spaziale. Dopo aver perfezionato il robot Delta, Clavel riuscì a ottenere il brevetto nel 1985. Sebbene esistesse già un robot parallelo, esso era utilizzato soltanto nei simulatori di volo.

Il robot Delta utilizzato nel confezionamento delle barrette di cioccolato
Come è fatto il robot Delta
Il robot Delta è un robot parallelo, un sistema che utilizza dei bracci meccanici controllati da un computer per supportare una piattaforma. Si dicono paralleli quei robot in cui l’end-effector (la piattaforma) è collegata alla base tramite tre o sei bracci indipendenti che lavorano in parallelo.
Questi robot sono particolarmente utili in determinati settori. Ogni braccio è corto, semplice e rigido per contrastare i movimenti imprevisti della piattaforma. Gli errori di un braccio vengono compensati dal movimento degli altri. Questo meccanismo consente un adeguato livello di rigidità del sistema rispetto alle singole componenti.
Un altro vantaggio è dato dalla possibilità che le apparecchiature pesanti siano montate nel centro di una piattaforma anche con una sola base, in modo da permettere movimenti più veloci, riducendo il peso.
Questi robot vengono utilizzati nei simulatori di volo e di guida, nelle fresatrici di precisione e nell’imballaggio.
Nei robot Delta è fondamentale l’utilizzo di parallelogrammi con restrizioni del movimento a semplici traslazioni della piattaforma finale. La base è montata sopra il piano di lavoro e su di essa vengono collocati gli attuatori. Dalla base si estendono tre bracci collegati a una piattaforma triangolare. I bracci sono fatti da materiali compositi leggeri, cosicché le parti mobili del robot siano dotate di inerzia, in modo tale da permettere velocità e accelerazioni molto elevate.
Il robot Delta di Clavel è dotato di quattro gradi di libertà: tre traslazioni e una rotazione. In questo caso un quarto braccio si estende dalla base al centro della piattaforma triangolare dando al dispositivo di estremità un quarto grado rotazionale di libertà lungo l’asse verticale.
Successivamente sono state create altre versioni di robot Delta, ad esempio quella con sei gradi di libertà, il Delta Direct Drive e il Pocket Delta.
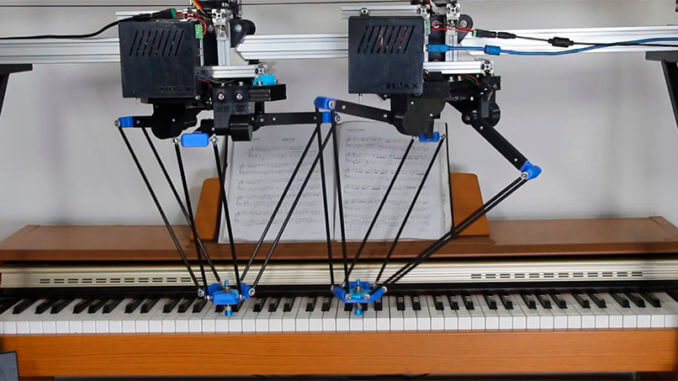
Un originale utilizzo del robot Delta X.
Principali applicazioni del robot Delta
I robot Delta hanno trovato una grande applicazione nell’industria dell’imballaggio e in quella farmaceutica, grazie alla loro velocità. Inoltre, per la loro precisione e rigidità vengono utilizzati anche per la chirurgia.
Di recente, la tecnologia è stata implementata nelle stampanti 3D, più veloci e meno costose delle stampanti di tipo Cartesiano.

Video: Il robot Delta implementato in una stampante 3D
Conclusioni
Le ricerche di Clavel, quindi, continuano ad avere applicazione in vari settori. Non a caso, egli definì il robot Delta come “il progetto della sua vita”. Clavel ha sempre incentivato i suoi assistenti a cercare soluzioni innovative, ancor prima di studiare la letteratura scientifica per risolvere una problematica. Il suo motto “think outside the box” ha fatto sì che la sua mente trovasse una risposta concreta ed efficace alle esigenze dell’industria manifatturiera.
Sotto la sua direzione, inoltre, l’EPFL ha ottenuto ben 25 brevetti, prodotto 35 tesi di dottorato e creato sei start up.
Altri articoli della serie “Inventori dell’AI”
Alan Turing: il padre dell’informatica
George Devol, il nonno della robotica
Isaac Asimov, scienziato e scrittore
Joseph Engelberger – Il padre della robotica
Ben Skora, l’autodidatta della robotica
Victor David Scheinman: l’inventore di Stanford Arm e PUMA
Hiroshi Ishiguro, il creatore dei robot geminoidi