
Il Selective Compliance Assembly Robot Arm o Selective Compliance Articulated Robot Arm (SCARA) è un robot industriale molto diffuso per le operazioni di montaggio grazie alle sue caratteristiche peculiari. La seconda denominazione iniziò a essere utilizzata nel momento in cui tali robot vennero utilizzati per funzioni diverse dall’assemblaggio. Il termine compliance (adattabilità) fa riferimento alla flessibilità del robot SCARA in uno o più dei suoi giunti.
Indice degli argomenti:
Robot SCARA, come sono fatti
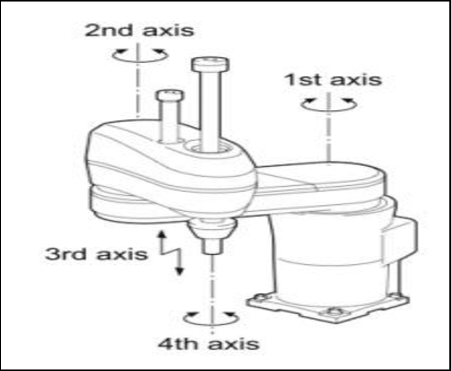
Questi robot sono costituiti da quattro assi con e sono adattabili sugli assi X-Y, ma rigidi sull’asse Z. Essi eseguono operazioni di montaggio, di prelievo e scarico che richiedono un utensile, ad esempio una pinza o un utensile multiuso da installare a fine braccio con cacciaviti o distributori.
Per capire perché tali robot sono molto diffusi in ambito industriale, è utile analizzarne le caratteristiche. Ci sono sei ambiti in cui gli SCARA sono differenti da altri robot:
- rigidità: gli SCARA sono meno rigidi dei robot Cartesiani ma più rigidi dei robot Delta e a 6 assi;
- velocità: sono meno veloci dei robot Delta, ma più veloci dei robot a 6 assi e quindi molto adatti per essere utilizzati per processi di “pick and place”;
- assi: hanno un minor grado di libertà rispetto ai robot a 6 assi, in quanto, come i robot Delta, hanno solo 4 assi;
- carico: la capacità di carico è abbastanza bassa;
- ripetibilità: sono dotati di un alto livello di precisione e, per questo, sono particolarmente adatti a svolgere compiti di assemblaggio;
- costo: sono più economici rispetto ai robot Delta.
Robot SCARA, quali utilizzi
Tali robot sono quindi molto vantaggiosi per la velocità, l’efficienza e il basso costo. I robot SCARA sono impiegati per svolgere funzioni di varia natura. Essi nascono per assolvere a mansioni di assemblaggio; la loro velocità, precisione e adattabilità, infatti, li rende particolarmente adatti a tale ambito di applicazione. Essi, poi, sono impiegati in processi di “pick and place“; pur essendo meno veloci dei Delta, tali robot sono più facili da installare nelle aziende, in quanto non è necessario che siano montati al di sopra dell’area di lavoro utilizzata dagli SCARA, che è di forma cilindrica con variazioni di diametro e profondità del cilindro.
Video: Una dimostrazione delle capacità del robot SCARA Fanuc New SR-3iA
In gran parte delle applicazioni, tali robot eseguono operazioni di montaggio e di prelievo e scarico che richiedono un utensile. Potrebbe trattarsi di una semplice pinza o un utensile multiuso da installare a fine braccio con cacciaviti o distributori.

Video: Robot Epson
Robot SCARA, la storia

Hiroshi Makino
Il primo modello è stato sviluppato nel 1981 dalle società Sankyo Seiki, Pentel and NEC, sotto la guida di Hiroshi Makino ed è progettato per imitare l’azione di un braccio umano. Nel 1978, Makino propose un nuovo modello di struttura cinematica, costituita da tre giunti con assi paralleli e un giunto prismatico alla fine della catena cinematica. La caratteristica principale era che l’adattabilità in direzione orizzontale risultava minore di quella in direzione verticale, in modo da rendere il robot particolarmente adatto a svolgere compiti di assemblaggio.
Makino fu ispirato dal robot Sigma, che aveva visto in opera durante il Simposio Internazionale sui Robot Industriali, che si tenne a Tokyo nel 1977. Il professor Makino decise allora di creare il Consorzio sui Robot SCARA, costituito insieme a 13 aziende giapponesi, che nel 1978 progettò il primo prototipo.
Solo nel 1984 venne messo in commercio per la prima volta un robot SCARA, il modello AdeptOne.

Tali robot, grazie alla loro accuratezza e velocità nell’eseguire operazioni, furono impiegati da subito nella catena di montaggio, non più nel settore automotive, ma nella produzione di beni di consumo, specialmente nel mercato elettronico. Questo avvenne, in modo particolare, in Giappone, paese che negli anni ’80 divenne leader nella produzione di robot e di prodotti elettronici.
Prospettive future
La capacità di un SCARA di essere controllato a distanza permette di porre rimedio alla pericolosità dei siti di lavoro per l’essere umano, come ad esempio l’utilizzo di prodotti chimici o il lavoro in ambienti con condizioni estreme, come un’acciaieria. Inoltre, l’esigenza delle aziende di soddisfare una richiesta di prodotti sempre maggiori, fa sì che esse prediligano tali robot all’interno dei loro impianti, in modo tale da rendere più rapide le operazioni e accorciare i tempi di produzione. Nel prossimo futuro, come sottolineato dalla società EVS Tech, nella produzione degli SCARA potranno esserci notevoli sviluppi, quali la creazione di robot a due braccia, robot facilmente programmabili, e una maggiore convenienza dal punto di vista economico.


