
I ricercatori del Dipartimento di Informatica dell’Università di Oxford, in collaborazione con un team della Bogazici University, a Istanbul, in Turchia, hanno sviluppato un nuovo sistema di intelligenza artificiale, denominato GRAMME, che consente ai veicoli autonomi di navigare meglio in condizioni meteorologiche avverse. I risultati della ricerca sono stati pubblicati sulla rivista scientifica Nature Machine Intelligence.
Il problema del rilevamento in condizioni meteo estreme
L’abstract spiega ciò che i ricercatori si proponevano: “La capacità di conoscere la posizione precisa sulla mappa è un prerequisito impegnativo per veicoli autonomi sicuri e affidabili, a causa delle imperfezioni del sensore in condizioni ambientali e meteorologiche avverse, ponendo un formidabile ostacolo al loro uso diffuso”.
In sostanza, i veicoli a guida autonoma corrono un rischio maggiore di essere rilevati in una posizione errata in condizioni meteorologiche estreme, come forti piogge, nevischio o neve, che potrebbero influire sui sensori. Ciò potrebbe avere conseguenze pericolose in determinati scenari, se, ad esempio, l’auto autonoma si rileva in una corsia errata prima di una svolta o nella posizione sbagliata in un incrocio, dove potrebbe non fermarsi in tempo.
Per affrontare questo problema, i ricercatori hanno sviluppato un nuovo modello di apprendimento profondo auto-supervisionato, componente chiave di uno stack algoritmico di guida autonoma che stima la posizione di movimento dell’auto in relazione agli ostacoli osservati dal veicolo.
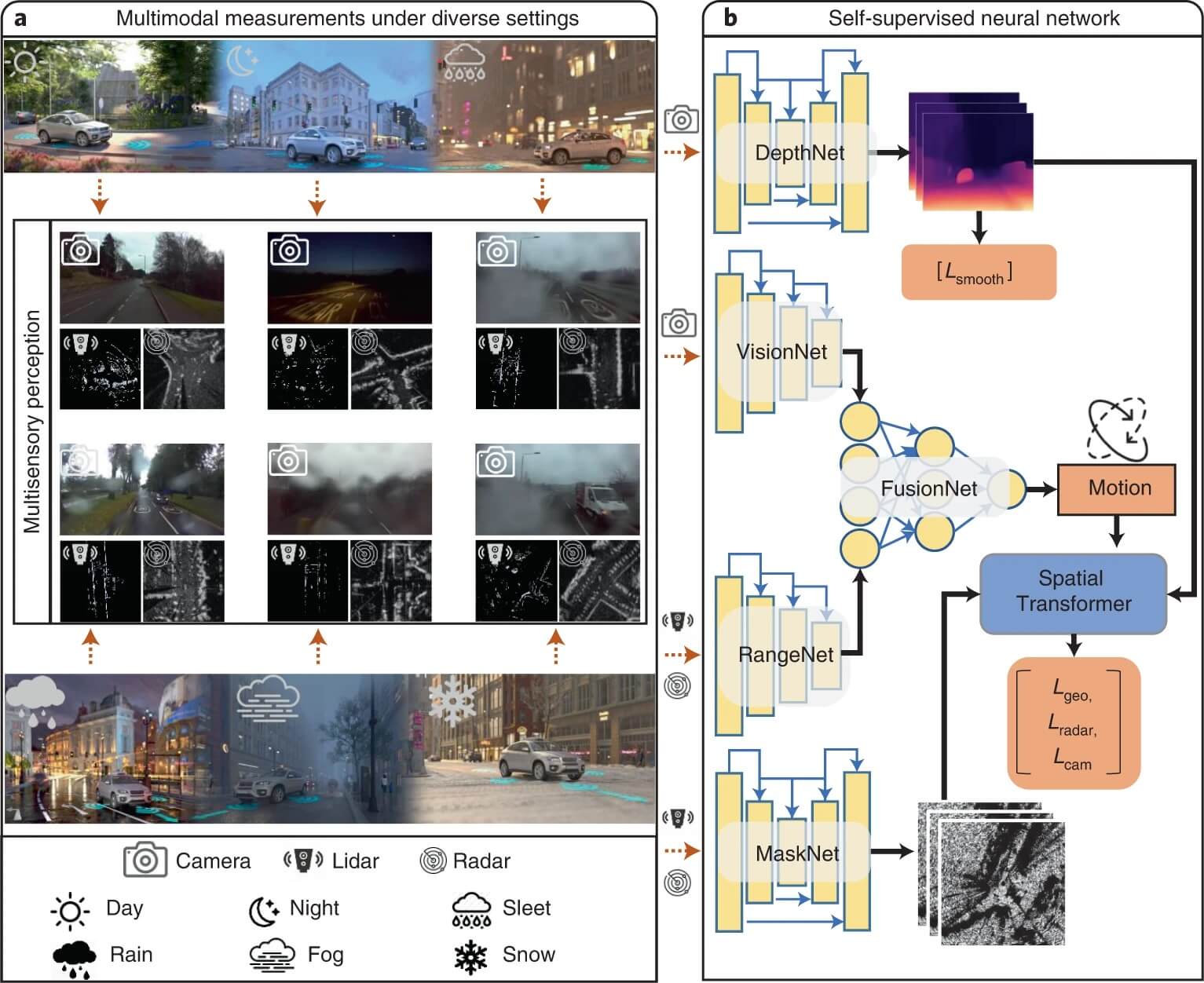
Il modello ha preso in considerazione le informazioni provenienti da sensori, come telecamere, lidar e radar – che sono tutti influenzati in modi diversi da condizioni meteorologiche diverse, come scarsa luce o precipitazioni – in modo che i benefici di ciascuno possano essere utilizzati in condizioni diverse.
Una selezione di set di dati di guida autonoma disponibili pubblicamente è stata utilizzata per generare algoritmi in grado di ricreare la geometria di una scena e calcolare la posizione di un’auto da nuovi dati. I test in una varietà di condizioni, tra cui nebbia, neve e pioggia, hanno dimostrato la robustezza del modello.
Il team ritiene che la sua ricerca segni una svolta significativa, con l’abstract che conclude: “Prevediamo che il nostro lavoro porterà i veicoli autonomi un passo più vicino alla guida autonoma sicura e affidabile per tutte le stagioni”.
Andrew Markham, del Dipartimento di Informatica dell’Università di Oxford, che ha co-supervisionato lo studio, ha aggiunto: “Stimare la posizione precisa dei veicoli a guida autonoma è una pietra miliare fondamentale per raggiungere una guida autonoma affidabile in condizioni difficili”.


