Quando si parla di robot occorre riferirsi a categorie specifiche, poiché le tipologie in cui si dividono sono tante e diverse. Analizziamo cos’è un robot cartesiano.
Indice degli argomenti:
Cos’è un robot cartesiano
Il robot cartesiano è il robot che si muove in linea retta lungo un sistema di coordinate cartesiane: gli assi x, y e z del piano.
Il piano cartesiano è così chiamato dal matematico e filosofo francese René Descartes (Cartesio) che, a metà del Seicento, a partire dagli studi del matematico Nicola d’Oresme, ne dimostrò l’utilità.

Fonte Wikimedia
È composto da due rette, x e y, perpendicolari tra loro e orientate dal punto in cui si incrociano, chiamato origine. È un sistema di riferimento, che consente di individuare la posizione di qualsiasi punto nello spazio, calcolandone le coordinate in base alla distanza dalle due rette: la retta x, ovvero l’asse orizzontale delle ascisse, e la retta y, ovvero l’asse verticale delle ordinate.
Se alle due rette x e y si aggiunge l’asse z della profondità, anche questo orientato perpendicolarmente agli altri due rispetto all’origine, si ottiene un sistema di riferimento tridimensionale.
Questo sistema è alla base dei movimenti del robot cartesiano: l’asse x è il movimento “avanti o indietro”, l’asse y quello “sopra o sotto”, l’asse z “dentro o fuori”.
La normativa ISO 8373:2012 definisce un robot industriale come un dispositivo manipolatore a controllo automatico, con almeno tre assi, riprogrammabile e multiuso, che può essere in posizione fissa o mobile e viene utilizzato per l’automazione industriale: il robot cartesiano, che si muove in maniera coordinata su tre assi ed è programmato e gestito da software PLC o CNC, rientra in questa definizione.
I robot cartesiani vengono utilizzati nel posizionamento e nell’assemblaggio di componenti elettroniche, quindi nelle operazioni di carico e scarico continuo (pick and place) di pezzi sulla linea di produzione e nella logistica. Possono essere considerate robot cartesiani le macchine a controllo numerico e le stampanti 3D.
Come funziona un robot cartesiano
Un robot viene detto manipolatore perché agisce in un ambiente attraverso movimenti programmati.
Come tutti i robot, anche il robot cartesiano è formato da uno o più corpi rigidi collegati da giunti: da un estremo si trova la base, fissa al pavimento o mobile, e all’altro estremo si trova l’end effector, l’utensile specifico che effettua l’azione per cui il robot è stato programmato: una fresa per il taglio, un trapano per l’assemblaggio, una pinza per la presa e il posizionamento dell’oggetto. La porzione di spazio su cui può agire l’end effector viene detta spazio di lavoro.
I giunti, cioè i collegamenti tra i corpi rigidi del robot, possono essere prismatici o rotoidali: i prismatici permettono il movimento lineare, facendo scivolare le due parti interconnesse; i rotoidali il movimento rotatorio, facendoli ruotare su uno specifico asse.
La particolarità dei robot cartesiani è che hanno solo giunti prismatici per i movimenti principali: possono quindi muoversi solo in linea retta sui tre assi.
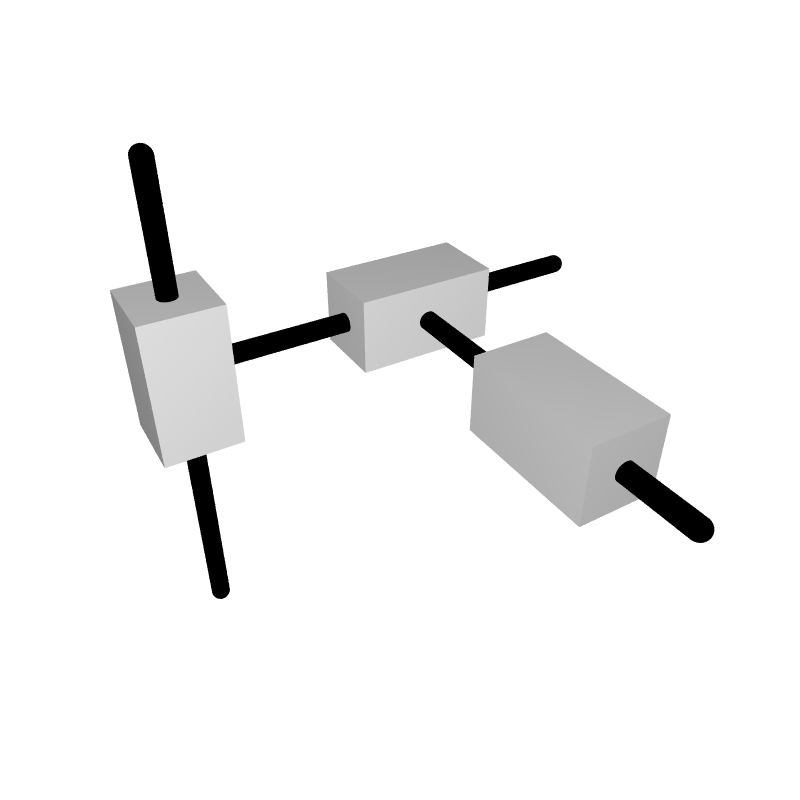
Fonte Wikimedia
I tre giunti prismatici di un robot cartesiano sono perpendicolari tra loro e posizionati in corrispondenza dei tre assi del sistema cartesiano, a partire dall’asse x, sulla base a terra: ciascun punto della loro traiettoria può essere quindi calcolato e programmato momento per momento.
I tre giunti corrispondono ai movimenti “indietro-avanti” (asse x), “sopra-sotto” (asse y), “dentro-fuori” (asse z).
I robot cartesiani sono quindi rigidi, non possono inclinarsi o ruotare su sé stessi. A volte, un asse rotatorio viene aggiunto tra i movimenti dell’end effector.
Un robot cartesiano completo è formato da: corpi rigidi (assi e telaio di supporto), motore (a induzione con inverter, motore passo-passo a corrente continua, servomotori brushless), sensori, attuatori, un quadro elettronico con software di comando e controllo (PLC o CNC) e un’interfaccia uomo-macchina HMI, anche touchscreen. A volte il motore è posizionato sul carrello per corse più lunghe sull’asse x.
Tipi di robot cartesiani e caratteristiche
I robot hanno al massimo sei gradi di libertà di movimento, tre di traslazione e tre di rotazione: i robot cartesiani, che si muovono attraverso due o tre giunti prismatici, si caratterizzano quindi per un massimo di tre gradi di libertà di traslazione lineare. A questi, si aggiungono a volte ulteriori gradi di libertà se nell’end effector vengono inseriti giunti rotoidali.
I robot cartesiani classici possono essere a due o a tre assi, ma non tutti i robot che si muovono su due o tre assi sono cartesiani.
Un esempio sono le slitte XY, i sistemi a scorrimento incrociato, che hanno gli assi x e y centrati l’uno sull’altro e il carico spesso centrato sull’asse y. I robot cartesiani, invece, hanno l’asse y o z “a sbalzo”, cioè sporgente e collegato all’asse sottostante solo da una estremità, con una differente portata di carico.
La caratteristica dell’asse “a sbalzo” differenzia i robot cartesiani anche dai robot gantry o a portata, costruiti su due assi di base x e l’asse y che li attraversa, per una migliore sopportazione del carico ma una minore dimensione dello spazio di lavoro. Non è raro, comunque, che i gantry vengano ricompresi tra i robot cartesiani, anche ad assi maggiori di tre.

Robot pallettizzatore (immagine: LinearLead)
Vantaggi di un robot cartesiano
Un robot cartesiano ha un funzionamento semplice, che lo rende economico, personalizzabile, facile da costruire, installare e gestire, nel controllo e nella manutenzione.
Ha un design scalabile: la lunghezza, la corsa e il carico di ciascun asse possono essere commisurati in relazione alle esigenze. Possono essere progettati con i materiali più funzionali, ottimizzati in base alla tipologia e alla frequenza del compito da eseguire e non è difficile trovare i pezzi di ricambio sul mercato.
Più robot cartesiani possono essere gestiti con un solo controllore e non richiedono necessariamente operazioni di computazione complesse per programmare il raggiungimento delle posizioni desiderate.
Infatti, lo spazio di lavoro di un robot cartesiano è un parallelepipedo dai confini tracciati dal movimento degli assi: un’area ben delimitata, che richiede minori accorgimenti in relazione alla sicurezza rispetto ad altre tipologie di robot.
La loro struttura rigida e la possibilità di effettuare movimenti in linea retta li rendono idonei allo spostamento di carichi pesanti anche su lunghe distanze ma non ovviamente ad effettuare movimenti di rotazione complessi o che richiedono gradi di libertà maggiori.

Video: robot pallettizzatore DMC Robotic
I robot cartesiani sono particolarmente adatti al pick and place: sulla linea di produzione, possono essere usati per posizionare componenti diverse prima dell’assemblaggio, nella saldatura a punti di precisione e in tutte le attività che richiedono un posizionamento di precisione; in logistica, vengono usati nelle operazioni di carico e scarico, pallettizzazione e depallettizzazione, automazione dell’imballaggio.
Il loro utilizzo ha un notevole potenziale di impatto sull’automazione di questi processi, con conseguente aumento della velocità e della precisione di esecuzione, riduzione dei tempi di produzione e ottimizzazione delle risorse.