L’intelligenza artificiale generativa sta cambiando (anche) il modo in cui si progettano i robot. Al MIT CSAIL, ovvero il Computer Science and Artificial Intelligence Laboratory del Massachusetts Institute of Technology (MIT) (ovvero il Laboratorio di Informatica e Intelligenza Artificiale del MIT) i ricercatori hanno sviluppato un nuovo approccio che permette ai modelli di diffusione – come quelli alla base di DALL–E – di andare ben oltre la semplice generazione di immagini o video, spingendosi fino alla creazione di strutture fisiche funzionanti.
tecnologia
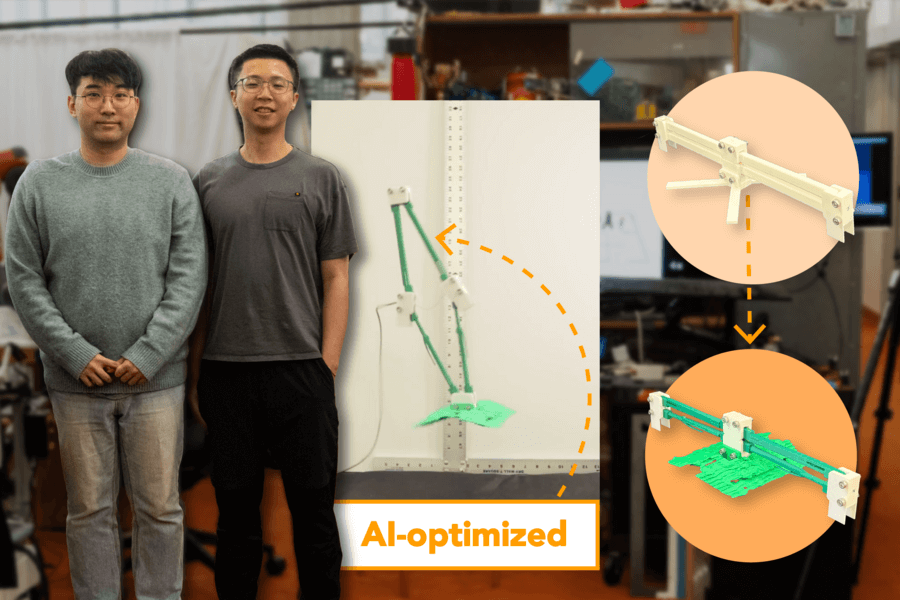
Il MIT usa l’AI generativa per progettare nuovi robot
Utilizzando modelli di diffusione simili a quelli di DALL-E, i ricercatori hanno ottimizzato la struttura di un robot saltatore e di un glider subacqueo, migliorandone sensibilmente prestazioni e stabilità. I risultati, ottenuti attraverso simulazioni e stampa 3D, mostrano come l’AI possa non solo affiancare l’ingegno umano, ma proporre soluzioni strutturali del tutto nuove
Pubblicato il 17 lug 2025